本页面提供的是上一版软件的文档。当前版本中已删除对应的英文页面。
使用 Simulink 实现计算机视觉
使用 Computer Vision Toolbox™ 模块为计算机视觉应用构建模型。执行特征检测、图像分析、FIR 滤波、频率和霍夫变换、形态学运算、对比度增强和去噪。
局部特征及其描述符是许多计算机视觉算法的构建块。其应用包括图像配准、目标检测和分类、跟踪和运动估计。
运动估计和跟踪是活动识别、交通监控、汽车安全和监督等应用中的关键活动。
分析和增强方法使您能够提高信噪比和突出特征。
showvipblockdatatypetable 函数提供有关所有 Computer Vision Toolbox 模块的模块功能、代码生成限制、可变大小和支持的数据类型的详细信息。
模块
对象
Simulink.ImageType | Specify image data type (自 R2021b 起) |
主题
- Video Formats
Video data is a series of images over time.
- Image Formats
In the Computer Vision Toolbox software, images are real-valued ordered sets of color or intensity data.
- Fixed-Point Signal Processing
Discusses advantages of fixed-point development in general and of fixed-point support in System Toolbox software in particular, as well as lists common applications of fixed-point signal processing development.
- Fixed-Point Concepts and Terminology
Defines fixed-point concepts and terminology that are helpful to know as you use DSP System Toolbox™ software.
- Arithmetic Operations
Describes the arithmetic operations used by fixed-point DSP System Toolbox blocks, including operations and casts that might invoke rounding and overflow handling methods.
- 对 MATLAB System object 的定点支持
对 Computer Vision Toolbox System object 启用定点支持。
- Specify Fixed-Point Attributes for Blocks (DSP System Toolbox)
Teaches you how to specify fixed-point attributes and parameters in software on both the block and system levels.
- Visualize Point Cloud Sequence
This example shows how to visualize a streaming point cloud sequence by using a Point Cloud Viewer block.
精选示例
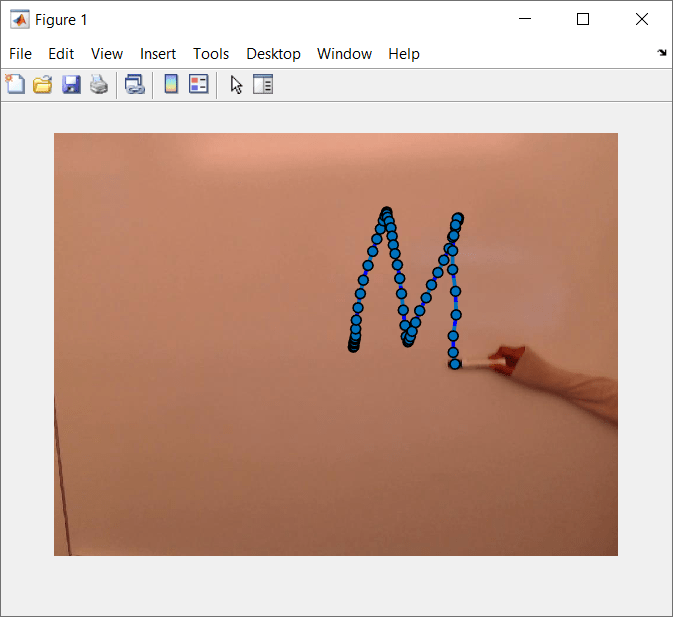
Track Marker Using Simulink Images
Track a marker on a whiteboard by using images of the Simulink.ImageType data type.
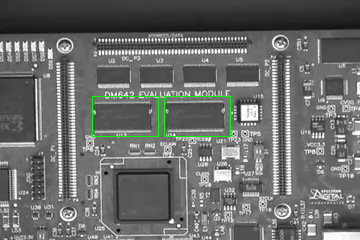
Pattern Matching
Use the 2-D normalized cross-correlation for pattern matching and target tracking.
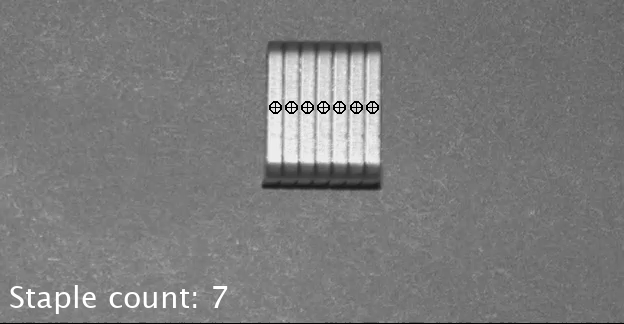
Object Counting
Use basic morphological operators to extract information from a video stream. In this case, the model counts the number of staples in each video frame. Note that the focus and lighting change in each video frame.
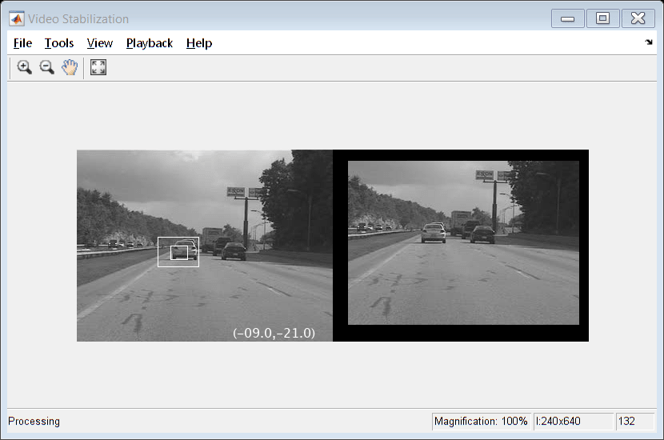
Video Stabilization
Remove the effect of camera motion from a video stream.
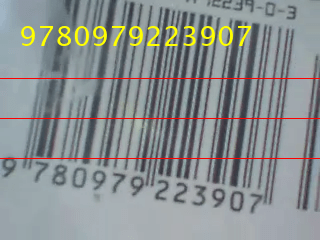
Barcode Recognition Using Live Video Acquisition
Use the From Video Device block provided by Image Acquisition Toolbox™ to acquire live image data from a Point Grey Flea® 2 camera into Simulink®. The example uses the Computer Vision Toolbox™ to create an image processing system which can recognize and interpret a GTIN-13 barcode. The GTIN-13 barcode, formally known as EAN-13, is an international barcode standard. It is a superset of the widely used UPC standard.
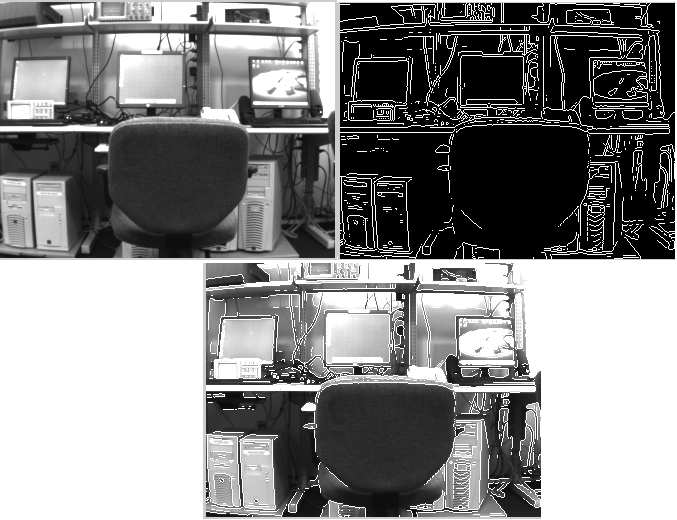
Edge Detection Using Live Video Acquisition
Use the From Video Device block provided by Image Acquisition Toolbox™ to acquire live image data from a Hamamatsu C8484 camera into Simulink®. The Prewitt method is applied to find the edges of objects in the input video stream.