本页面提供的是上一版软件的文档。当前版本中已删除对应的英文页面。
建模
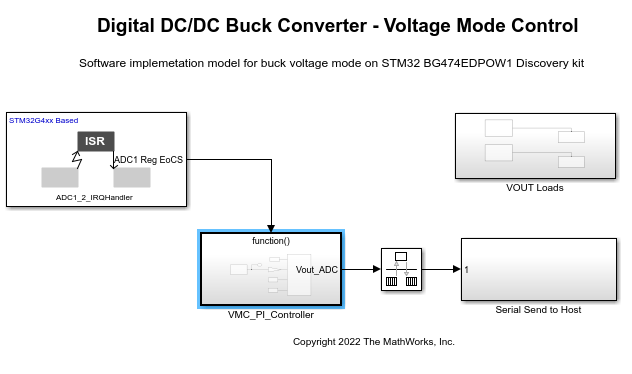
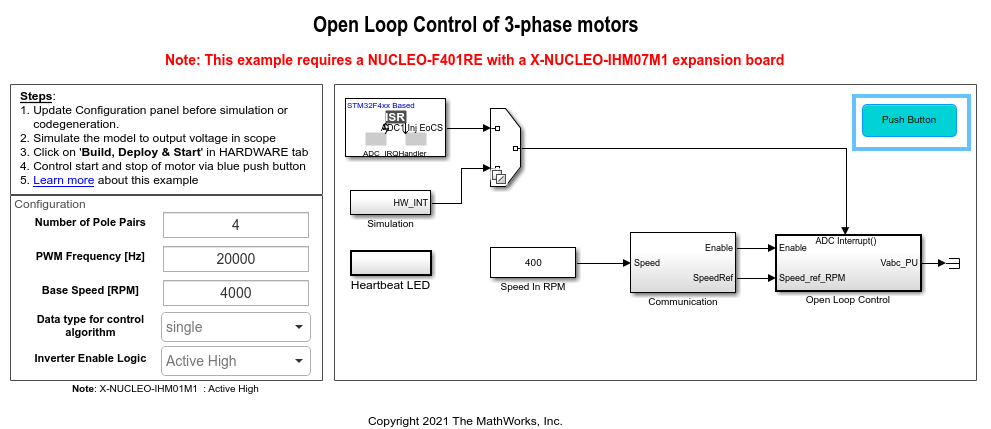
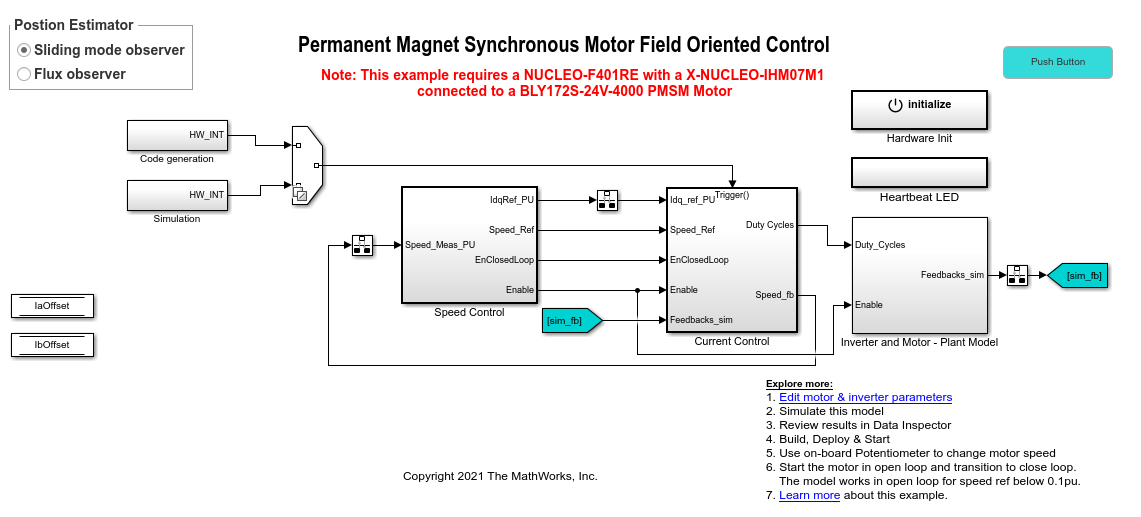
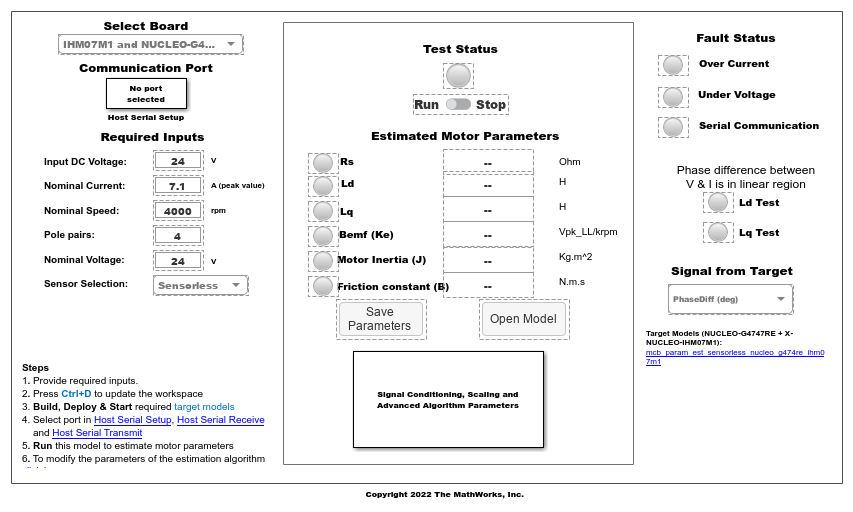
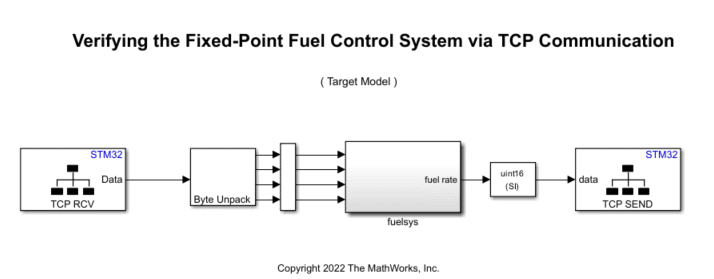
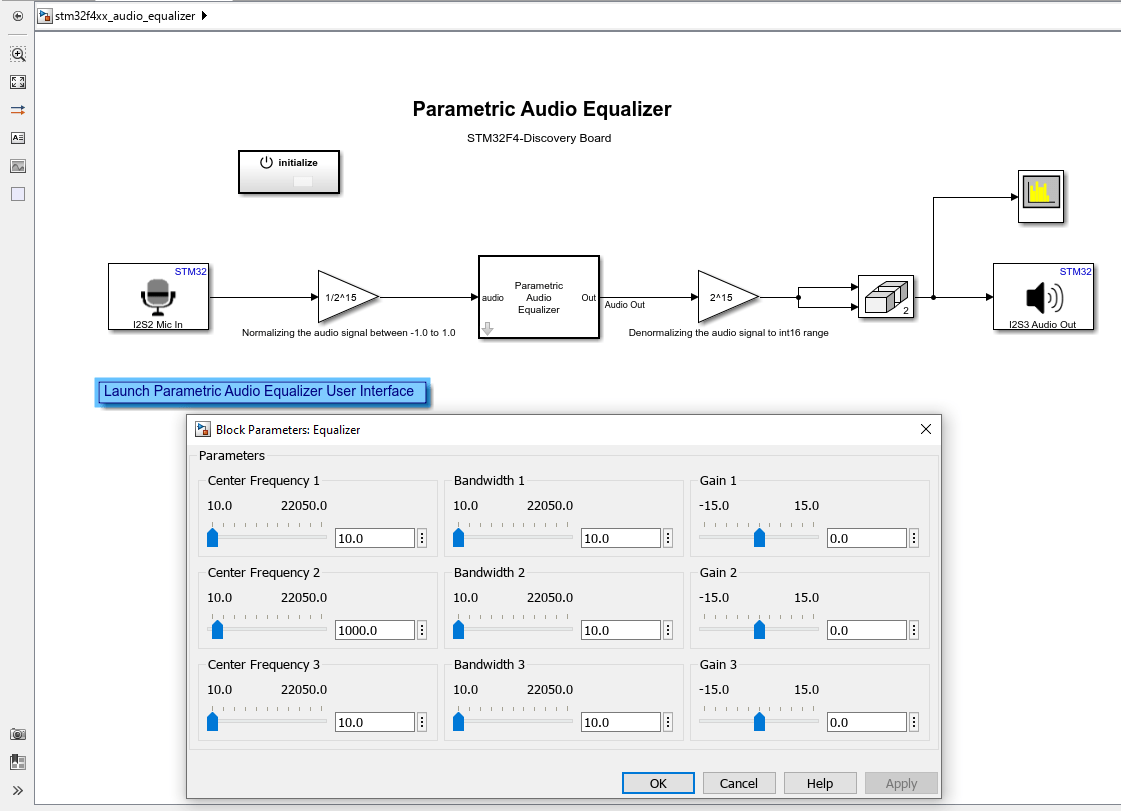
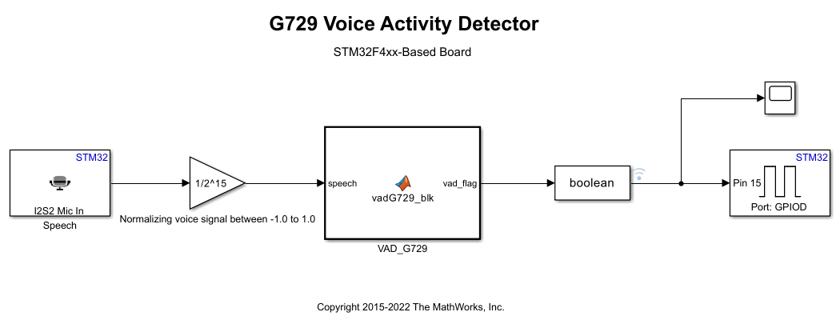
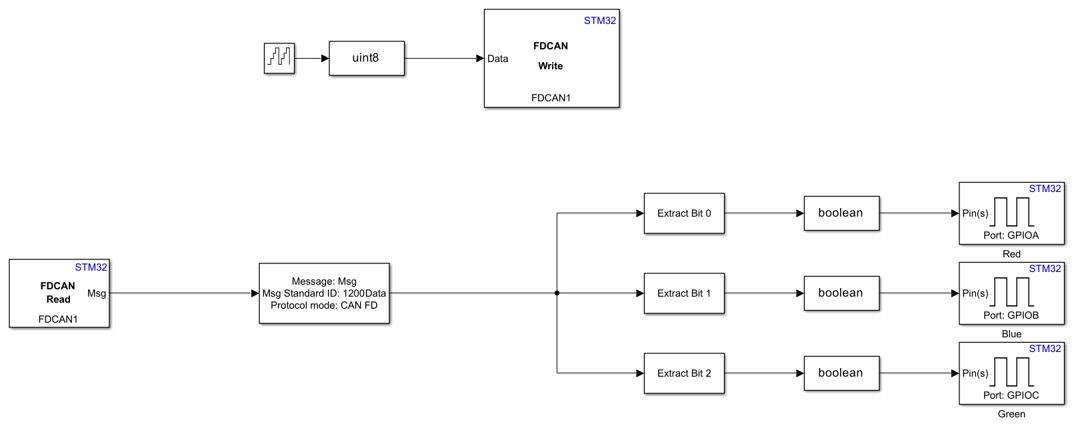
准备模型以便与基于 STM32 处理器的板进行硬件连接,添加模块以支持硬件协议
模块
主题
- Configure STM32 Processor-Based Boards using STM32CubeMX with Simulink
Configure the STM32 Processors-Based Boards to use STM32CubeMX project with Simulink.
- Configure Ethernet Options in STM32CubeMX for STM32 Processor Based Boards
Ethernet configuration in STM32CubeMX project.
- Set Up Scheduling Options for STM32 Processor-Based Boards
Setting up scheduling options for STM32 processor based boards.
- Use SoC Blockset Pass-Through Block Simulation
Use the SoC Blockset™ block pass through to add simulation to STM blocks.
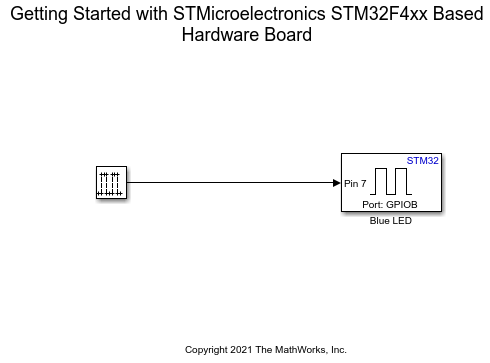
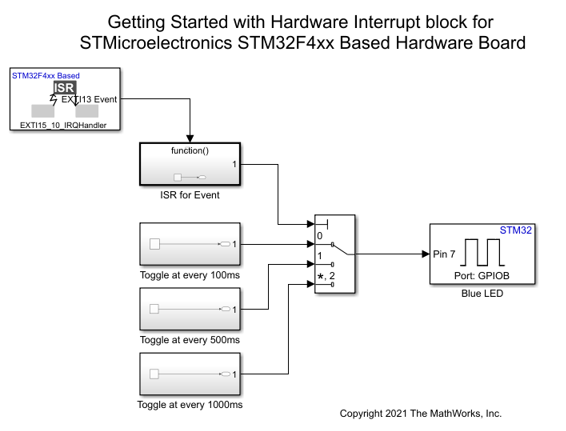
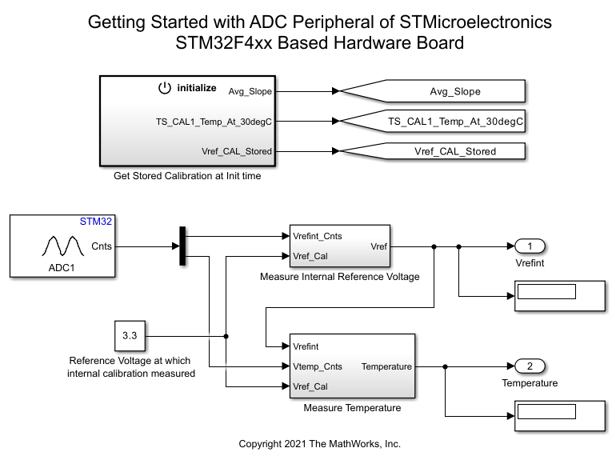
精选示例
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)