Improve PID Design in Presence of Nonlinearities and Uncertainties
Real-world plants often violate the linear assumptions behind nominal PID controller design. Common nonlinear behavior such as saturation, dead zones, friction, or changing dynamics over different operating conditions can degrade tracking accuracy.
This topic provides an overview of strategies you can use to enhance performance under nonlinear and uncertain conditions, including adaptive tuning, gain scheduling, disturbance and uncertainty compensation, and advanced controllers.
How Nonlinearities and Uncertainties Affect PID Performance
These nonlinearities can lead to:
Reduced Accuracy — The controller may not maintain the desired transient and steady state response across all operating range.
Instability — In certain regions of operation, nonlinear effects can reduce the robustness of the control loop.
Poor Tuning Performance — A PID tuned for one operating point may perform poorly at others, requiring gain scheduling or adaptive control.
Choose Technique
Use this table to pick an approach based on your plant knowledge, constraints, and tolerance for control structure changes.
| Method | How it Works | Advantages | Risks | When to Use | Typical Applications |
|---|---|---|---|---|---|
| ★Retune with Extremum Seeking Control Based Adaptive Tuning | Online, model-free optimization: perturbs input with small oscillations, measures output, adjusts control to drive system toward performance extremum (min/max). | No plant model needed, adapts to time-varying conditions, handles nonlinear unknown systems. | Need to specify learning rate, can be sensitive to noise depending on design parameters, requires persistent excitation. | When the objective is performance optimization in real time, especially with uncertain or time-varying plants. | Maximum power point tracking (MPPT), antilock braking. |
| Implement PID Gain Scheduling Based on Operating Condition | Automatically switches between pretuned gains based on operating condition. | No explicit system identification required, uses experimental data. | Limited to PID structure, performance depends on data quality | When you want data-driven PID controller tuning without building a detailed plant model. | PID tuning, systems where plant modeling is hard or unknown. |
| Augment with Disturbance Compensation Techniques | Observer-based estimates of disturbance and subtracts them from control input. | Simple concept, improves tracking | Requires accurate disturbance model estimation, may amplify noise with high observer bandwidth | When model uncertainty is high and real-time disturbance rejection is critical. | Motion control, robotics, electromechanical drives. |
| Replace with Sliding Mode Controller | Drives system state to a “sliding surface” and maintains motion on it using discontinuous control law. | Strong robustness to matched uncertainties and disturbances, simple design. | Chattering (high-frequency switching), may excite unmodeled dynamics. | When robustness to uncertainty is key and actuators can tolerate fast switching. | Motor drives, aerospace, uncertain nonlinear systems. |
| Replace with Model Reference Adaptive Controller | Adjusts controller parameters online so system output tracks a reference model. | Guarantees asymptotic tracking under assumptions, systematic Lyapunov-based design. | Requires persistency of excitation, risk of instability if adaptation is too aggressive. | When system dynamics vary with operating conditions and a reference model is available. | Aerospace, robotics, systems with changing dynamics. |
| Replace with Adaptive or Nonlinear Model Predictive Control | Predicts outputs with disturbance/noise models and solves QP to optimize control subject to constraints. | Handles constraints explicitly; multivariable; band‑limited disturbance shaping. | Requires models and QP solver; more complex; computational cost. | When constraints and multivariable interactions are critical. | Process control, constrained systems, MIMO with delays. |
Extremum Seeking Control Based Adaptive Tuning
Extremum seeking control (ESC) is a model-free, real-time adaptive control algorithm that is useful for adapting parameters to unknown system dynamics and unknown mappings from control parameters to an objective function. You can use extremum seeking to solve static optimization problems and to optimize parameters of dynamic systems. In this case, you can tune PID gains to optimize performance in real time.
When to use — You need real-time optimization to tune PID parameters based on an objective function and you have slowly-changing operating conditions.
How to use — Define an objective function and use Extremum Seeking Control block to tune the PID parameters.
Architecture — Implement ESC-based tuning as shown in this image.
Examples
Additional Resources
Extremum Seeking Control (block reference)
Extremum Seeking Control (concept reference)
What is Extremum Seeking Control (Tech Talk)
Schedule PID Gains Based on Operating Condition
A gain-scheduled PID controller is a controller whose gains are automatically adjusted as a function of time, operating condition, or plant parameters. Gain scheduling is a common strategy for controlling systems whose dynamics change with time or operating condition and the controller switches between pretuned PID gains based on operating conditions.
When to use — You have known operating regions and tuned controller gains for them.
How to use — Identify operating regions and tune controller gains one-region at a time.
Architecture — Use one of the several strategies to schedule PID gains based on operating condition, such as lookup tables or the PID Gain Scheduler block.
Examples
Additional Resources
Augment with Disturbance Compensation Techniques
Using disturbance compensation techniques allow you to model uncertain dynamics and nonlinearities as disturbances and reject them.
Extended State Observer
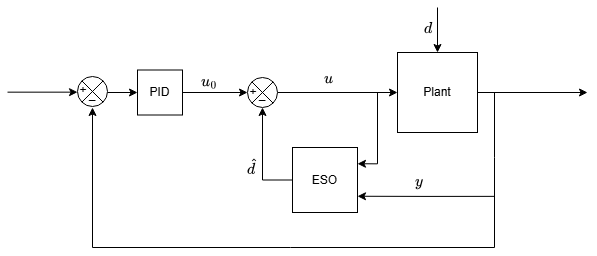
An extended state observer (ESO) is a state estimation technique that allows you to estimate the states and disturbances of a plant based on the its inputs and outputs. The algorithm models unmodeled dynamics as an extended state of the plant to perform the estimation.
When to use — You need to estimate both the internal states and unmodeled dynamics of a system using only input-output data. ESO is useful when you do not have a full model but you can provide a physical representation or an approximation of the plant in the following form. Based on the plant inputs u and measured outputs ym, the Extended State Observer block returns estimated states () and disturbances (). Using these estimated states and disturbances, you can implement state feedback or disturbance compensation control techniques. The accuracy of estimation will depend on the accuracy of the plant approximation.
How to use — You can use the estimated disturbances from the Extended State Observer block along with your PID controller and modify the actions of nominal controller to compensate for unmodeled dynamics and improve PID performance. Tune ESO using the observer bandwidth and pole spacing parameters to adjust estimation speed and stability.
Architecture — This figure shows a typical way of implementing ESO to compensate for unmodeled plant dynamics or uncertainties.
Examples
Additional Resources
Ultra Local Model
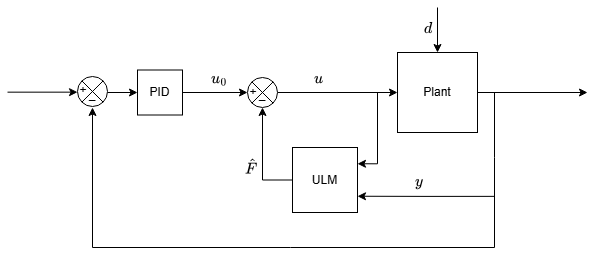
Ultra-local model (ULM) is an estimation technique that allows you to approximate a nonlinear plant as a single or double integrator system with an affine term that captures unknown dynamics and disturbances. The estimated model is valid only for a local operating point over a short period of time.
When to use — Modeling is difficult and you can approximate plant as a single or double integrator system at a local operating point over a short period of time. This is useful for nonlinear systems where only local behavior matters and the dynamics can be approximated as a first-order or second-order integrator with an affine disturbance term. ULM is well-suited for applications where the system operates around a local point and disturbances vary over time. You can use both as a standalone estimator or integrate it with nominal PID controllers to enhance disturbance rejection. This technique is especially beneficial when you can provide a rough estimate of input gain and require real-time estimation of disturbances using input-output data over a short time window.
How to use — Use ULM estimate along with the PID controller to improve PID performance for the system with model uncertainties and external disturbances. Tune ULM using the input gain α, estimator sample time, and integration window size to balance responsiveness and noise robustness.
Architecture — This figure shows a typical way of implementing ULM in your existing control architecture to improve PID performance.
Examples
Additional Resources
Replace PID with Advanced Controllers
When you can change the existing structure of your model and are able implement advanced control strategies, you can use the following advanced controllers to provide performance and robustness in presence of nonlinearities or uncertain dynamics.
Sliding Mode Control
Sliding mode control (SMC) is a control technique where you define a sliding surface that the system state trajectory converges to and remains on. This sliding surface is designed such that it is insensitive to disturbances and uncertainties in the system. Once the system state trajectory is on the sliding surface, the controller uses a feedback control law to drive the system state trajectory to the desired state along the sliding surface.
For more information, see Sliding Mode Control. For examples, see Sliding Mode Control Design for a Robotic Manipulator and Stabilize Chua System Using Sliding Mode Controller.
Model Reference Adaptive Control
The Model Reference Adaptive Control block computes control actions to make an uncertain controlled system track the behavior of a given reference plant model. Using the direct and indirect MRAC techniques, you can estimate a model of the external disturbances and uncertainty in the system being controlled. The controller then uses this model to compensate for the disturbances and uncertainty when computing control actions.
For more information, see Model Reference Adaptive Control. For examples , see Indirect MRAC Control of Mass-Spring-Damper System and Indirect Model Reference Adaptive Control of First-Order System.
Adaptive or Nonlinear MPC
A model predictive controller uses linear plant, disturbance, and noise models to estimate the controller state and predict future plant outputs. Using the predicted plant outputs, the controller solves a quadratic programming optimization problem to determine optimal manipulated variable adjustments. For more information, see MPC Controller (Model Predictive Control Toolbox), MPC Prediction Models (Model Predictive Control Toolbox), and Why Use MPC?. For examples, see Use MPC with Extended State Observer to Reject Unmeasured Output Disturbances (Model Predictive Control Toolbox).