装配
使用关节和约束模块连接实体,将它们装配成一个铰接式系统。关节模块决定了所连接实体之间允许的最大自由度(旋转自由度和平移自由度)。约束模块通过应用通常会耦合自由度的运动学关系来降低这个自由度数量。模型拓扑没有任何限制:您可以对运动学树(例如双摆)和运动学环路(例如四杆机构)进行建模。
类
Simscape 模块
主题
使用关节装配实体
- Create a Mechanism with Different Joints in MATLAB
This example shows how to model a mechanism that contains different types of joints in MATLAB®. - How Multibody Assembly Works
Connecting bodies with joints, positioning and orienting joint frames through rigid transforms, and guiding joint assembly through by specifying joint state targets. - Multibody Assembly Workflow
Workflow steps for assembling body subsystems into an articulated multibody model. - Modeling Joint Connections
Role of joints in a multibody model. Joints as systems of joint primitives with elementary degrees of freedom. Accounting for the effects of joint inertia in a model. - Model an Open-Loop Kinematic Chain
Assemble body subsystems and revolute joints into an open-loop kinematic chain. - Model a Closed-Loop Kinematic Chain
Assemble body subsystems and revolute joints into a closed-loop kinematic chain. - Troubleshoot an Assembly Error
Use Multibody Explorer and Variable Viewer to identify and correct a model assembly error.
约束多体装配体
- Assemble a Gear Model
Learn how to satisfy the assembly requirements of gear constraints using Rigid Transform blocks. - Counting Degrees of Freedom
Using the Simscape™ Statistics Viewer to determine the motion degrees of freedom in a mechanism. - Constrain a Point to a Curve
Use a Point on Curve Constraint block to restrict the motion of an aircraft flap to a curved trajectory specified in a Spline block. - Model a Compound Gear Train
Use the Common Gear Constraint block to couple the rotational motions of the bodies comprising a planetary gear system. - Modeling Gear Constraints
Learn how to model gear constraints using simple gear models as examples. - Using Limits in Joint Blocks to Constrain Motion
This example uses penalty-based limit forces provided by joint blocks to model three different simple systems.
精选示例
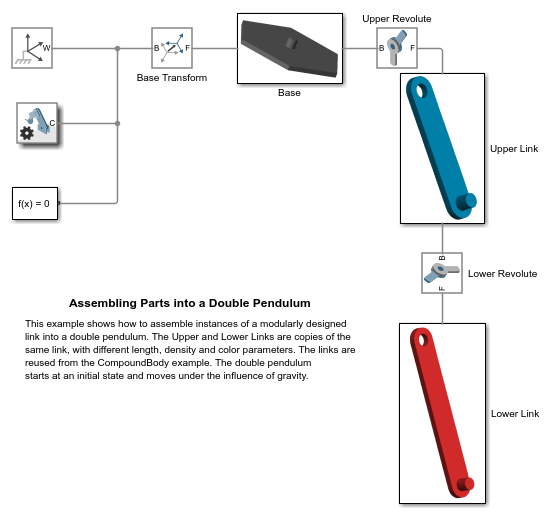
Assembling Parts into a Double Pendulum
Assemble instances of a modularly designed link into a double pendulum. The Upper and Lower Links are copies of the same link, with different length, density and color parameters. The links are reused from the CompoundBodyExample example. The double pendulum starts at an initial state and moves under the influence of gravity.
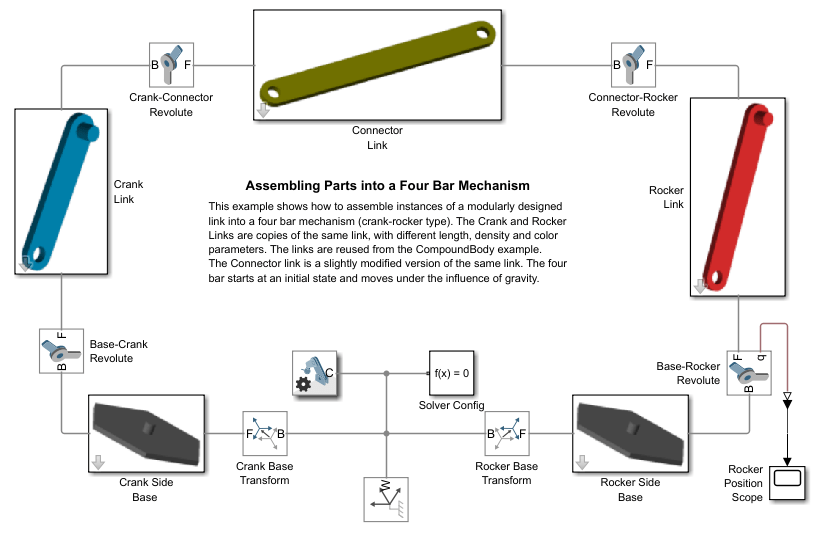
Model a Four-Bar Mechanism
Learn how to model a four-bar mechanism with detailed step-by-step guide. Discover how to assemble a crank-rocker mechanism using a pre-constructed link model, set initial states, and drive the mechanism.
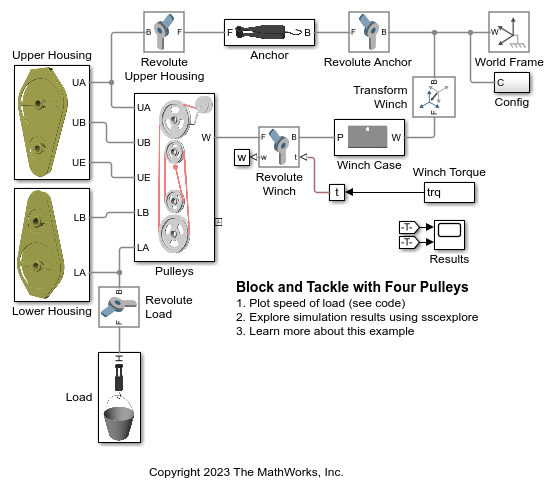
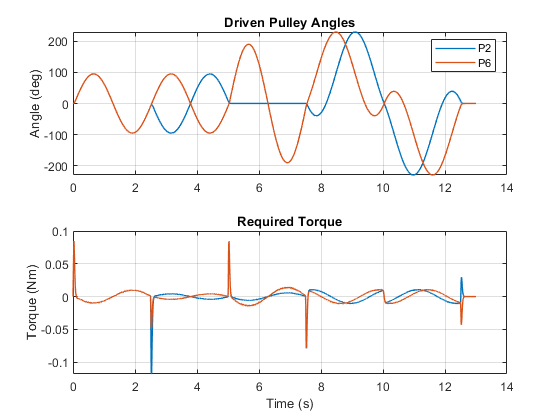
Block and Tackle with Four Pulleys
Models a block and tackle with four pulleys. Torque is applied to a winch which acts through the pulley mechanism to lift a load. Blocks from the Simscape™ Multibody™ Belts and Cables library are used to model the block and tackle.
Cable-Driven Cross Slide Table
Models an XY cross positioning table that uses a cable-driven mechanism. A single cable wraps around seven different pulleys and converts the rotational angle of the two input pulleys to the x-y position of the table.
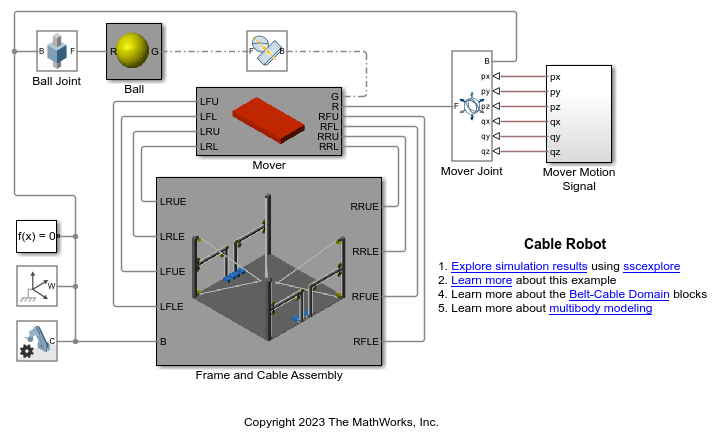
Cable Robot
Models a cable robot. The robot comprises 8 independent belt-cable circuits which control the 6 degrees-of-freedom of the mover. A ball is dropped from a fixed height down the center axis of the mechanism. The mover initially starts directly below the ball and the contact is modeled between the mover and the ball such that the ball bounces elastically when striking the mover. The objective of the mover is to perform increasingly complex maneuvers between successive bounces of the ball. The mover is motion actuated from which the necessary cable, pulley, and motor spool kinematics are computed.

Creating a Four Bar Multibody Mechanism in MATLAB
Constructs a four bar mechanism in MATLAB® using Simscape™ Multibody™. It demonstrates various classes under simscape.multibody.* namespace to build a multibody system in MATLAB.

How to Build a Multibody in Simulink
Highlights key concepts and recommended steps for building a mechanical model using Simscape™ Multibody™. A simple design problem has been chosen to serve this purpose. The following section describes the design problem and subsequent sections discuss how to solve it.
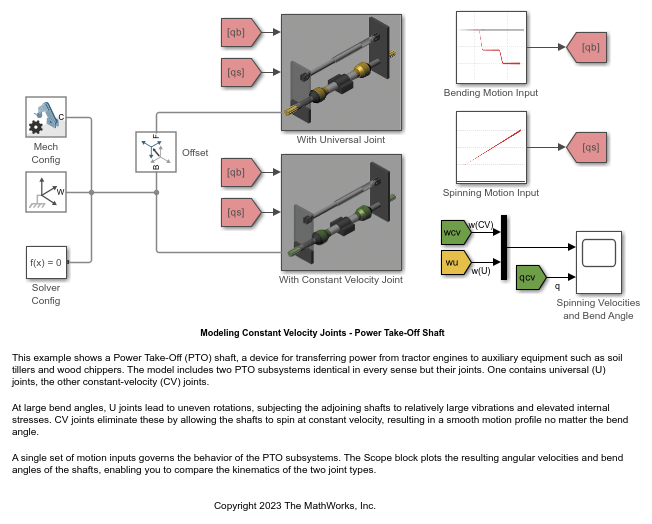
Modeling Constant Velocity Joints - Power Take-Off Shaft
A Power Take-Off (PTO) shaft, a device for transferring power from tractor engines to auxiliary equipment such as soil tillers and wood chippers. The model includes two PTO subsystems identical in every sense but their joints. One contains universal (U) joints, the other constant-velocity (CV) joints.
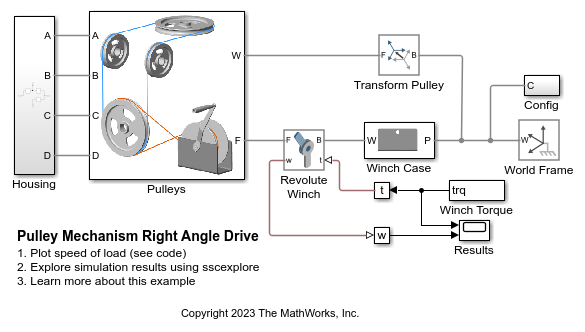
Pulley Mechanism Right Angle Drive
Models a pulley mechanism that takes a torque applied to a winch and transmits it to a pulley rotated at 90 degrees to that winch. This example uses blocks from the Simscape Multibody Belts and Cables library to model a pulley mechanism that is not all in a single plane.
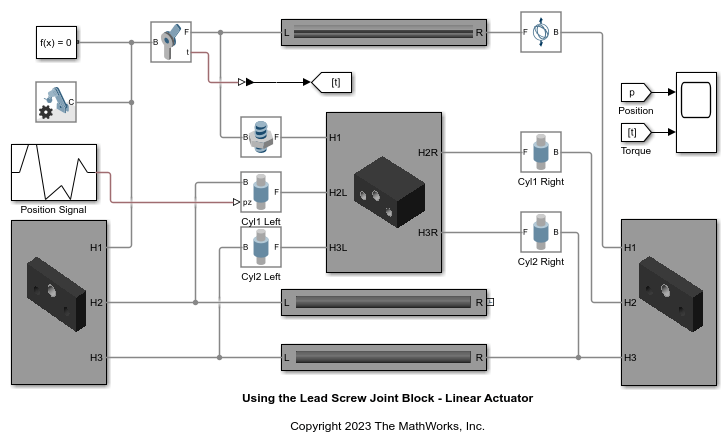
Using the Lead Screw Joint Block - Linear Actuator
Illustrates the use of the Lead Screw Joint block to model a linear actuator. The Lead Screw Joint block converts rotational motion at the Revolute Joint block to translational motion at the four Cylindrical Joint blocks. The translational motion is specified as a motion input to a cylindrical joint and the necessary actuator torque is automatically computed at the revolute joint.
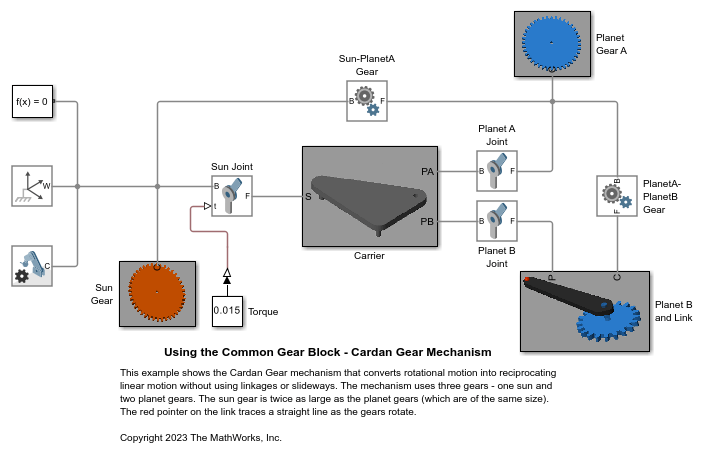
Using the Common Gear Block - Cardan Gear Mechanism
The Cardan Gear mechanism that converts rotational motion into reciprocating linear motion without using linkages or slideways. The mechanism uses three gears - one sun and two planet gears. The sun gear is twice as large as the planet gears (which are of the same size). The red pointer on the link traces a straight line as the gears rotate.
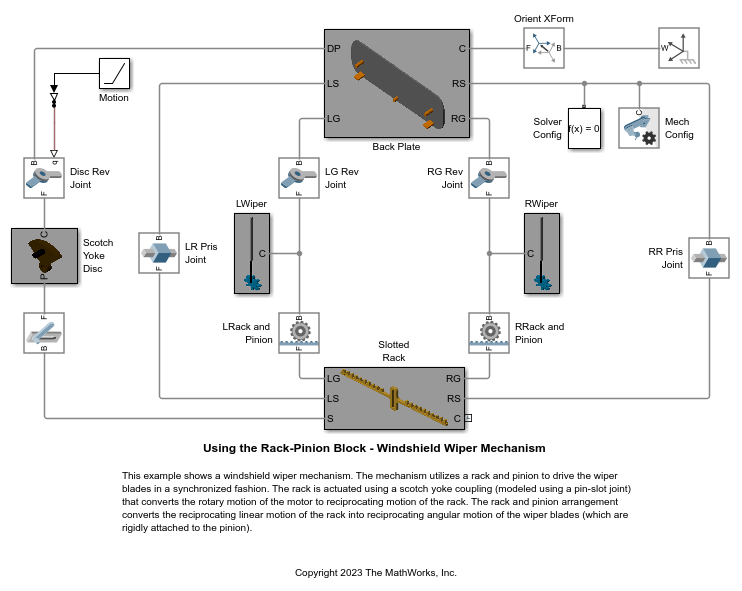
Using the Rack-Pinion Block - Windshield Wiper Mechanism
A windshield wiper mechanism. The mechanism utilizes a rack and pinion to drive the wiper blades in a synchronized fashion. The rack is actuated using a scotch yoke coupling (modeled using a pin-slot joint) that converts the rotary motion of the motor to reciprocating motion of the rack. The rack and pinion arrangement converts the reciprocating linear motion of the rack into reciprocating angular motion of the wiper blades (which are rigidly attached to the pinion).

Using the Worm and Gear Constraint Block - Solar Tracker
Illustrates the use of the Worm and Gear Constraint block to model a solar tracker. A slew drive containing a worm and gear constraint powers the yaw rotation of the solar trackers. The worm and gear geometry gives a large reduction in a single stage of gearing which provides precision tracking and high torque output. The yaw rotation is specified as a motion input to the gear revolute joint and the necessary actuator torque is automatically computed at the worm revolute joint.
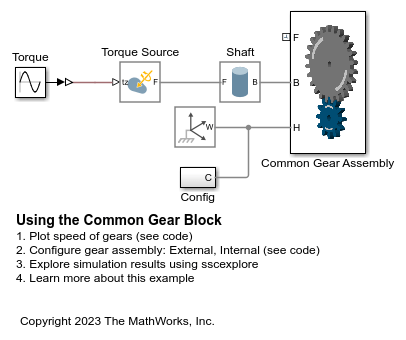
Using the Common Gear Block
Models a pair of gears with parallel axes. The assembly contains the two gears and all constraints required for the gear set. The assembly can be configured to model an external or internal gear set by adjusting parameters in the mask.

Using the Point-On-Curve Block: Flapping Wing Mechanism
This model simulates a barrel cam based wing flapping mechanism. This is a one degree of freedom mechanism and the two wings flap in sync with each other. The Spline and Point On Curve blocks have been used to model the Barrel Cam mechanism that actuates the flapping motion of the wings.

Variable Mode Joint Contact - Drop and Catch Mechanism
A rotating arm that raises up a ball, drops the ball, and catches the ball in one cycle of rotation.

Variable Mode Joint Recirculation - Collision Course
Simulates three balls with trajectories that restart when they reach the bottom of an obstacle course, allowing each of them to traverse the course multiple times per simulation.
How to Build a Multibody System in MATLAB
Highlights key concepts and recommended steps for building a multibody system in MATLAB®. A simple design problem has been chosen to serve this purpose. The following section describes the design problem and subsequent sections discuss how to solve it.