Data Processing and Visualization
Convert coordinate frames, generate trajectories, visualize point clouds and
transformations
Use the data processing and visualization functions as utility functions that convert between different coordinate systems, generate trajectories from waypoints, or visualize data like point clouds or UAV poses.
Functions
Blocks
| Coordinate Transformation Conversion | Convert to a specified coordinate transformation representation |
Topics
- Depth and Semantic Segmentation Visualization Using Unreal Engine Simulation
This example shows how to visualize depth and semantic segmentation data captured from a camera sensor in a simulation environment.
- Map and Classify Urban Environment Using UAV Camera and Deep Learning
Use a UAV with a camera to survey and develop an orthomosaic of an urban environment.
Featured Examples

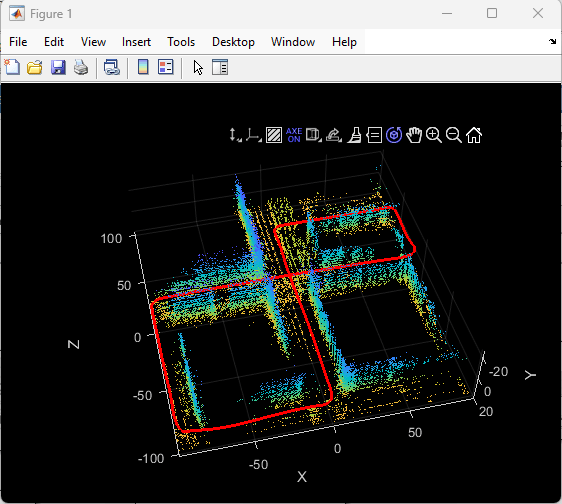
Map Environment for Motion Planning Using UAV Lidar
Use a UAV with lidar sensor to create a 3D occupancy map for motion planning.
Stereo Visual SLAM for UAV Navigation in 3D Simulation
Generate a map for a city block scene in an Unreal Engine environment using stereo visual simultaneous localization and mapping.