nerfacto
Dense reconstruction and novel view synthesis using Nerfacto Neural Radiance Field (NeRF) model
Since R2026a
Description
Add-On Required: This feature requires the Computer Vision Toolbox Interface for Nerfstudio Library add-on.
Use the nerfacto object to reconstruct a 3-D representation of
a scene, as a dense, colored point cloud, from 2-D images by using the Nerfacto Neural
Radiance Field (NeRF) model [1] from the Nerfstudio library [2]. To generate a dense, colored point cloud of a scene, use the generatePointCloud function. You can synthesize novel views of the scene by
using the generateViews
function.
Note
This feature requires the Computer Vision Toolbox Interface for Nerfstudio Library add-on, a Deep Learning Toolbox™ license, a Parallel Computing Toolbox™ license, and a CUDA® enabled NVIDIA® GPU with at least 16 GB of available GPU memory.
Creation
Create and train a nerfacto object on a collection of 2-D images taken
from different camera poses by using the trainNerfacto
function. The trainNerfacto function also generates the model folder that
contains the model weights and other parameters in the path that is returned in the
ModelFolder property.
Properties
Object Functions
generatePointCloud | Generate dense, colored point cloud using trained Nerfacto Neural Radiance Field (NeRF) model |
generateViews | Generate novel views using Nerfacto Neural Radiance Field (NeRF) model |
writeViews | Write novel views from Nerfacto Neural Radiance Field (NeRF) model to image files |
changePath | Update model folder property of trained Nerfacto NeRF model |
Examples
Download Pretrained NeRF Model
The tum_rgbd_nerfacto.zip file contains the trainedNerfactoTUMRGBD folder. The folder contains the saved-nerfacto-tum-rgbd.mat supporting file, which contains a nerfacto object that has been trained on a sequence of indoor images from the TUM RGB-D data set [1], and the nerfactoModelFolder folder, which contains the data and configuration files required for the Nerfstudio Library [2] to load and execute the trained NeRF model [3].
Download and extract tum_rgbd_nerfacto.zip.
if ~exist("tum_rgbd_nerfacto.zip","file") websave("tum_rgbd_nerfacto.zip","https://ssd.mathworks.com/supportfiles/3DReconstruction/tum_rgbd_nerfacto.zip"); unzip("tum_rgbd_nerfacto.zip",pwd); end
Specify the path to the folder containing the saved-nerfacto-tum-rgbd MAT file, and then load the pretrained nerfacto object into the workspace.
modelRoot = fullfile(pwd, "trainedNerfactoTUMRGBD"); load(fullfile(modelRoot, "saved-nerfacto-tum-rgbd.mat"))
Warning: The model folder for the nerfacto object could not be loaded. Update the model folder location using the <a href="matlab:doc('changePath')">changePath</a> method.
'\\mathworks\devel\sandbox\user\Shared\EX_25b\EX_nerfacto_feature\train_nerfacto_small'
MATLAB® displays a warning when you first load the pretrained nerfacto object into the workspace because the path to the model folder associated with the object, nerfactoModelFolder, changes when you extract the nerfacto_saved_model.zip.
To resolve this issue, use the changePath function to update the ModelFolder property of the trained nerfacto object to the current path of nerfactoModelFolder. This process can take a few minutes.
nerf = changePath(nerf, fullfile(modelRoot, "nerfactoModelFolder"));Changing nerfacto object model folder path. nerfacto object model folder path change complete.
Display the nerfacto object properties to verify that the ModelFolder property is set to the current path of nerfactoModelFolder on your system.
disp(nerf)
nerfacto with properties:
ModelFolder: "/home/user/Documents/MATLAB/ExampleManager/user.Bdoc.EX_26a_v1/vision-ex90891477/trainedNerfactoTUMRGBD/nerfactoModelFolder"
MaxIterations: 30000
Intrinsics: [1×1 cameraIntrinsics]
Generate Point Cloud with Pretrained NeRF Model
Use the generatePointCloud function to generate a dense, colored point cloud of the scene. Set the maximum number of points in the point cloud to 100,000 by specifying the MaxNumPoints name-value argument. This value achieves a balance between the quality of the point cloud, the computing time, and storage space.
ptCloud = generatePointCloud(nerf, MaxNumPoints=100000);
Generating point cloud from nerfacto object. Loading latest checkpoint from load_dir Setting up the Nerfstudio pipeline... [12:27:23 PM] Auto image downscale factor of 1 nerfstudio_dataparser.py:484 Setting up training dataset... Caching all 104 images. Loading latest checkpoint from load_dir nerfacto object point cloud generation complete.
Visualize Point Cloud
Visualize the point cloud by using the pcshow function, and specify the vertical axis and vertical axis direction to match the coordinate system of the TUM RGB-D data set used to train the nerfacto object. Modify the view of the point cloud visualization to focus on the scene region of interest by specifying the of low-level camera properties of the axes object. For more information on configuring these properties, see Low-Level Camera Properties.
figure ax = pcshow(ptCloud, VerticalAxis="y",VerticalAxisDir="down"); ax.CameraPosition = [-1.5185 -6.5178 -11.9106]; ax.CameraUpVector = [0.0520 -0.8878 0.4572]; ax.CameraViewAngle = 15; xlabel("X") ylabel("Y") zlabel("Z") title("Point Cloud from NeRF")
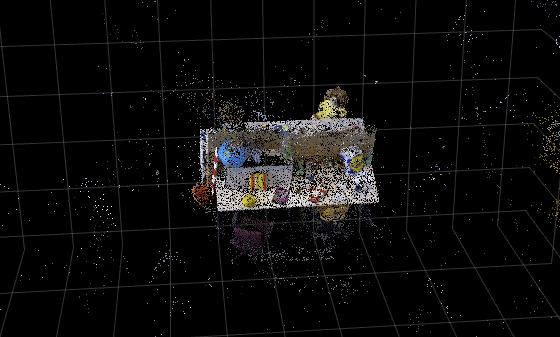
Tip: You can use the pcdenoise function to clean up the outliers and noise in the point cloud.
References
[1] Sturm, Jürgen, Nikolas Engelhard, Felix Endres, Wolfram Burgard, and Daniel Cremers. “A Benchmark for the Evaluation of RGB-D SLAM Systems.” 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2012, 573–80. https://doi.org/10.1109/IROS.2012.6385773.
[2] Tancik, Matthew, Ethan Weber, Evonne Ng, et al. “Nerfstudio: A Modular Framework for Neural Radiance Field Development.” Special Interest Group on Computer Graphics and Interactive Techniques Conference Proceedings, ACM, July 23, 2023, 1–12. https://doi.org/10.1145/3588432.3591516.
[3] Mildenhall, Ben, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. "NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis." In Computer Vision - ECCV 2020, edited by Andrea Vedaldi, Horst Bischof, Thomas Brox, and Jan-Michael Frahm. Springer International Publishing, 2020. https://doi.org/10.1007/978-3-030-58452-8_24.
Download Pretrained NeRF Model
The tum_rgbd_nerfacto.zip file contains the trainedNerfactoTUMRGBD folder. The folder contains the saved-nerfacto-tum-rgbd.mat supporting file, which contains a nerfacto object that has been trained on a sequence of indoor images from the TUM RGB-D data set [1], and the nerfactoModelFolder folder, which contains the data and configuration files required for the Nerfstudio Library [2] to load and execute the trained NeRF model [3].
Download and extract tum_rgbd_nerfacto.zip.
if ~exist("tum_rgbd_nerfacto.zip","file") websave("tum_rgbd_nerfacto.zip","https://ssd.mathworks.com/supportfiles/3DReconstruction/tum_rgbd_nerfacto.zip"); unzip("tum_rgbd_nerfacto.zip", pwd); end
Specify the path to the folder containing the saved-nerfacto-tum-rgbd MAT file, and then load the pretrained nerfacto object into the workspace.
modelRoot = fullfile(pwd, "trainedNerfactoTUMRGBD"); load(fullfile(modelRoot, "saved-nerfacto-tum-rgbd.mat"))
Warning: The model folder for the nerfacto object could not be loaded. Update the model folder location using the <a href="matlab:doc('changePath')">changePath</a> method.
'\\mathworks\devel\sandbox\user\Shared\EX_25b\EX_nerfacto_feature\train_nerfacto_small'
MATLAB® displays a warning when you first load the pretrained nerfacto object into the workspace because the path to the model folder associated with the object, nerfactoModelFolder, changes when you extract the nerfacto_saved_model.zip.
To resolve this issue, use the changePath function to update the ModelFolder property of the trained nerfacto object to the current path of nerfactoModelFolder. This process can take a few minutes.
nerf = changePath(nerf, fullfile(modelRoot, "nerfactoModelFolder"));Changing nerfacto object model folder path. nerfacto object model folder path change complete.
Display the nerfacto object properties to verify that the ModelFolder property is set to the current path of nerfactoModelFolder on your system.
disp(nerf)
nerfacto with properties:
ModelFolder: "/home/user/Documents/MATLAB/ExampleManager/user.Bdoc.EX_26a_v1/vision-ex39493372/trainedNerfactoTUMRGBD/nerfactoModelFolder"
MaxIterations: 30000
Intrinsics: [1×1 cameraIntrinsics]
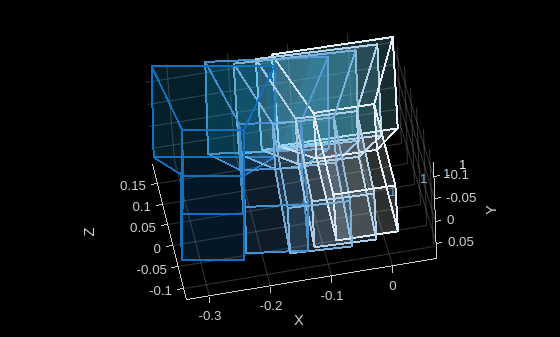
Load Camera Poses
This example contains a set of predefined camera poses that are stored as an array of rigidtform3d objects in the camera-poses-tum.mat file. These represent the position and orientation of the camera in the 3-D world coordinate system of the scene.
Load the camera-poses-tum.mat file into workspace, which contains the camera poses camPoses.
load("camera-poses-tum.mat","camPoses");
Display the camera poses by using the plotCamera function.
figure pcshow([NaN NaN NaN], VerticalAxis="y", VerticalAxisDir="down"); xlabel("X") ylabel("Y") zlabel("Z") hold on colors = sky(length(camPoses)); for i = 1:length(camPoses) plotCamera(camPoses(i), Size=0.1, Color=colors(i,:), Opacity=0.1); end hold off
Generate Novel Views with Pretrained NeRF Model
Generate the views captured by the camera poses camPoses by using the generateViews function.
images = generateViews(nerf,camPoses);
Generating views from nerfacto object. Loading latest checkpoint from load_dir nerfacto object view generation complete.
Tip: If you want to generate a large number of novel views, use the writeViews function instead of generateViews to avoid an out-of-memory error.
Display the generated images. The images show the globe and chairs in front of the desk that are present in the images used to train this NeRF model.
figure
montage(images, BorderSize=[2 2])
title("Rendered Images from Trained NeRF")
References
[1] Sturm, Jürgen, Nikolas Engelhard, Felix Endres, Wolfram Burgard, and Daniel Cremers. “A Benchmark for the Evaluation of RGB-D SLAM Systems.” 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2012, 573–80. https://doi.org/10.1109/IROS.2012.6385773.
[2] Tancik, Matthew, Ethan Weber, Evonne Ng, et al. “Nerfstudio: A Modular Framework for Neural Radiance Field Development.” Special Interest Group on Computer Graphics and Interactive Techniques Conference Proceedings, ACM, July 23, 2023, 1–12. https://doi.org/10.1145/3588432.3591516.
[3] Mildenhall, Ben, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. "NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis." In Computer Vision - ECCV 2020, edited by Andrea Vedaldi, Horst Bischof, Thomas Brox, and Jan-Michael Frahm. Springer International Publishing, 2020. https://doi.org/10.1007/978-3-030-58452-8_24.
Algorithms
By training a NeRF model on a set of sparse input images and camera poses, you can create an internal representation of a 3D scene. You can use a trained NeRF model to generate a dense, colored point cloud, and render images from novel viewpoints.
A NeRF model represents a scene as a continuous 5D vector-valued function instantiated as a neural network with weights Ω. The function accepts the position and direction of a light ray and returns the color and density of 3D points along the ray.
When generating a novel view, the NeRF model first uses the neural network to calculate the color and density of 3D points along each ray from a virtual camera. The ray is defined as r(t) = o + td, where o is the origin coordinates of the ray, and d is the unit vector in the ray direction defined by the camera angles θ and ϕ. The neural network return the color c(t) if the ray r(t) hits a particle at distance t along the ray. The model then uses volumetric rendering to project the output colors and densities into an image.
During training, a NeRF model first samples a batch of rays that consist of multiple spatial locations and viewing directions. The neural network FΩ then predicts the color and density at 3D points along each ray, and the NeRF model uses volumetric rendering to project the output colors and densities onto an image. The model calculates the training loss by matching the image pixels of the rendered image against the captured images in the training data.
References
[1] Mildenhall, Ben, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. “NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis.” In Computer Vision – ECCV 2020, edited by Andrea Vedaldi, Horst Bischof, Thomas Brox, and Jan-Michael Frahm. Springer International Publishing, 2020. https://doi.org/10.1007/978-3-030-58452-8_24.
[2] Tancik, Matthew, Ethan Weber, Evonne Ng, et al. “Nerfstudio: A Modular Framework for Neural Radiance Field Development.” Special Interest Group on Computer Graphics and Interactive Techniques Conference Proceedings, ACM, July 23, 2023, 1–12. https://doi.org/10.1145/3588432.3591516.
Version History
Introduced in R2026a