objectDetectorTrainingData
Create training data for an object detector
Syntax
Description
[
creates an image datastore and a box label datastore training data from the
specified ground truth. The function only selects images from the ground truth
input that contain one or more annotated objects.imds,blds] = objectDetectorTrainingData(gTruth)
You can combine the image and box label datastores using combine(imds,blds) to
create a datastore needed for training. Use the combined datastore with the
training functions, such as trainACFObjectDetector,
trainYOLOv2ObjectDetector, trainYOLOv3ObjectDetector, and trainYOLOv4ObjectDetector.
This function supports parallel computing using multiple MATLAB® workers. Enable parallel computing using the Computer Vision Toolbox Preferences dialog.
trainingDataTable = objectDetectorTrainingData(gTruth)gTruth is an array of groundTruth objects. You can use
the table to train an object detector using the Computer Vision Toolbox™ training functions.
[___] = objectDetectorTrainingData(
specifies options using one or more name-value arguments in addition to any
combination of arguments from previous syntaxes. For example,
gTruth,Name=Value)Verbose=True enables display to the workspace
environment.
If you create the groundTruth objects in
gTruth using a video file, a custom data source, or an
imageDatastore object with
different custom read functions, then you can specify any combination of
name-value arguments. If you create the groundTruth objects
from an image collection or image sequence data source, then you can specify
only the SamplingFactor and the
LabelType name-value arguments.
Examples
Train a vehicle detector based on a YOLO v2 network.
Add the folder containing training images to the workspace.
imageDir = fullfile(matlabroot,"toolbox","vision","visiondata","vehicles"); addpath(imageDir);
Load the vehicle ground truth data.
data = load("vehicleTrainingGroundTruth.mat");
gTruth = data.vehicleTrainingGroundTruth;Create an image datastore and box label datastore using the ground truth object.
[imds,bxds] = objectDetectorTrainingData(gTruth);
Combine the datastores.
cds = combine(imds,bxds);
Load the detector containing the dlnetwork object for training.
load("yolov2VehicleDetectorNet.mat","net"); classes = "vehicle"; aboxes = [8 8; 32 48; 40 24; 72 48]; detector = yolov2ObjectDetector(net,classes,aboxes);
Configure training options.
options = trainingOptions("sgdm", ... InitialLearnRate=0.001, ... Verbose=true, ... MiniBatchSize=16, ... MaxEpochs=30, ... Shuffle="every-epoch", ... VerboseFrequency=10);
Train the detector.
[detector,info] = trainYOLOv2ObjectDetector(cds,detector,options);
************************************************************************* Training a YOLO v2 Object Detector for the following object classes: * vehicle Training on single CPU. |========================================================================================| | Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning | | | | (hh:mm:ss) | RMSE | Loss | Rate | |========================================================================================| | 1 | 1 | 00:00:01 | 7.17 | 51.4 | 0.0010 | | 1 | 10 | 00:00:03 | 1.78 | 3.2 | 0.0010 | | 2 | 20 | 00:00:06 | 1.57 | 2.5 | 0.0010 | | 2 | 30 | 00:00:08 | 1.40 | 1.9 | 0.0010 | | 3 | 40 | 00:00:11 | 1.11 | 1.2 | 0.0010 | | 3 | 50 | 00:00:14 | 1.28 | 1.6 | 0.0010 | | 4 | 60 | 00:00:17 | 0.96 | 0.9 | 0.0010 | | 4 | 70 | 00:00:19 | 0.90 | 0.8 | 0.0010 | | 5 | 80 | 00:00:22 | 0.79 | 0.6 | 0.0010 | | 5 | 90 | 00:00:24 | 0.83 | 0.7 | 0.0010 | | 6 | 100 | 00:00:27 | 0.84 | 0.7 | 0.0010 | | 7 | 110 | 00:00:29 | 0.57 | 0.3 | 0.0010 | | 7 | 120 | 00:00:32 | 0.62 | 0.4 | 0.0010 | | 8 | 130 | 00:00:34 | 0.59 | 0.3 | 0.0010 | | 8 | 140 | 00:00:37 | 0.56 | 0.3 | 0.0010 | | 9 | 150 | 00:00:39 | 0.54 | 0.3 | 0.0010 | | 9 | 160 | 00:00:42 | 0.54 | 0.3 | 0.0010 | | 10 | 170 | 00:00:44 | 0.62 | 0.4 | 0.0010 | | 10 | 180 | 00:00:47 | 0.53 | 0.3 | 0.0010 | | 11 | 190 | 00:00:49 | 0.58 | 0.3 | 0.0010 | | 12 | 200 | 00:00:51 | 0.45 | 0.2 | 0.0010 | | 12 | 210 | 00:00:53 | 0.52 | 0.3 | 0.0010 | | 13 | 220 | 00:00:56 | 0.53 | 0.3 | 0.0010 | | 13 | 230 | 00:00:58 | 0.49 | 0.2 | 0.0010 | | 14 | 240 | 00:01:00 | 0.50 | 0.2 | 0.0010 | | 14 | 250 | 00:01:02 | 0.44 | 0.2 | 0.0010 | | 15 | 260 | 00:01:05 | 0.50 | 0.3 | 0.0010 | | 15 | 270 | 00:01:07 | 0.56 | 0.3 | 0.0010 | | 16 | 280 | 00:01:10 | 0.55 | 0.3 | 0.0010 | | 17 | 290 | 00:01:12 | 0.46 | 0.2 | 0.0010 | | 17 | 300 | 00:01:14 | 0.40 | 0.2 | 0.0010 | | 18 | 310 | 00:01:17 | 0.50 | 0.3 | 0.0010 | | 18 | 320 | 00:01:19 | 0.51 | 0.3 | 0.0010 | | 19 | 330 | 00:01:21 | 0.44 | 0.2 | 0.0010 | | 19 | 340 | 00:01:24 | 0.47 | 0.2 | 0.0010 | | 20 | 350 | 00:01:26 | 0.43 | 0.2 | 0.0010 | | 20 | 360 | 00:01:29 | 0.51 | 0.3 | 0.0010 | | 21 | 370 | 00:01:31 | 0.46 | 0.2 | 0.0010 | | 22 | 380 | 00:01:33 | 0.49 | 0.2 | 0.0010 | | 22 | 390 | 00:01:36 | 0.53 | 0.3 | 0.0010 | | 23 | 400 | 00:01:38 | 0.49 | 0.2 | 0.0010 | | 23 | 410 | 00:01:40 | 0.38 | 0.1 | 0.0010 | | 24 | 420 | 00:01:43 | 0.48 | 0.2 | 0.0010 | | 24 | 430 | 00:01:45 | 0.40 | 0.2 | 0.0010 | | 25 | 440 | 00:01:47 | 0.44 | 0.2 | 0.0010 | | 25 | 450 | 00:01:50 | 0.41 | 0.2 | 0.0010 | | 26 | 460 | 00:01:52 | 0.46 | 0.2 | 0.0010 | | 27 | 470 | 00:01:54 | 0.51 | 0.3 | 0.0010 | | 27 | 480 | 00:01:56 | 0.49 | 0.2 | 0.0010 | | 28 | 490 | 00:01:59 | 0.48 | 0.2 | 0.0010 | | 28 | 500 | 00:02:01 | 0.44 | 0.2 | 0.0010 | | 29 | 510 | 00:02:03 | 0.27 | 7.3e-02 | 0.0010 | | 29 | 520 | 00:02:05 | 0.37 | 0.1 | 0.0010 | | 30 | 530 | 00:02:08 | 0.32 | 0.1 | 0.0010 | | 30 | 540 | 00:02:10 | 0.33 | 0.1 | 0.0010 | |========================================================================================| Training finished: Max epochs completed. Detector training complete. *************************************************************************
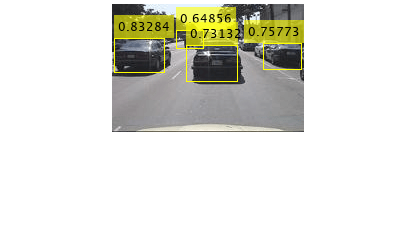
Read a test image.
I = imread("detectcars.png");Run the detector.
[bboxes,scores] = detect(detector,I);
Display the results.
if(~isempty(bboxes)) I = insertObjectAnnotation(I,"rectangle",bboxes,scores); end figure imshow(I)
Use training data to train an ACF-based object detector for stop signs
Add the folder containing images to the MATLAB® path.
imageDir = fullfile(matlabroot, 'toolbox', 'vision', 'visiondata', 'stopSignImages'); addpath(imageDir);
Load ground truth data, which contains data for stops signs and cars.
load('stopSignsAndCarsGroundTruth.mat','stopSignsAndCarsGroundTruth')
View the label definitions to see the label types in the ground truth.
stopSignsAndCarsGroundTruth.LabelDefinitions
ans=3×3 table
Name Type Group
____________ _________ ________
{'stopSign'} Rectangle {'None'}
{'carRear' } Rectangle {'None'}
{'carFront'} Rectangle {'None'}
Select the stop sign data for training.
stopSignGroundTruth = selectLabelsByName(stopSignsAndCarsGroundTruth,'stopSign');Create the training data for a stop sign object detector.
trainingData = objectDetectorTrainingData(stopSignGroundTruth); summary(trainingData)
trainingData: 41×2 table
Variables:
imageFilename: cell array of character vectors
stopSign: cell
Statistics for applicable variables:
NumMissing
imageFilename 0
stopSign 0
Train an ACF-based object detector.
acfDetector = trainACFObjectDetector(trainingData,'NegativeSamplesFactor',2);ACF Object Detector Training The training will take 4 stages. The model size is 34x31. Sample positive examples(~100% Completed) Compute approximation coefficients...Completed. Compute aggregated channel features...Completed. -------------------------------------------- Stage 1: Sample negative examples(~100% Completed) Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 19 weak learners. -------------------------------------------- Stage 2: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 20 weak learners. -------------------------------------------- Stage 3: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 54 weak learners. -------------------------------------------- Stage 4: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 61 weak learners. -------------------------------------------- ACF object detector training is completed. Elapsed time is 18.7885 seconds.
Test the ACF-based detector on a sample image.
I = imread('stopSignTest.jpg');
bboxes = detect(acfDetector,I);
Display the detected object.
annotation = acfDetector.ModelName;
I = insertObjectAnnotation(I,'rectangle',bboxes,annotation);
figure
imshow(I)
Remove the image folder from the path.
rmpath(imageDir);
Load image locations, label definitions and label data.
data = load('labelsWithAttributes.mat'); images = fullfile(matlabroot,'toolbox','vision','visiondata','stopSignImages', data.imageFilenames);
Create a ground truth object.
dataSource = groundTruthDataSource(images); gTruth = groundTruth(groundTruthDataSource(images), data.labeldefs, data.labelData);
Create an image datastore, box label datastore, and array datastore using the ground truth object.
[imds, blds, arrds] = objectDetectorTrainingData(gTruth);
Read all attributes.
readall(arrds)
ans=2×1 cell array
{1×1 struct}
{1×1 struct}
Input Arguments
Name-Value Arguments
Output Arguments
Image datastore, returned as an imageDatastore object
containing images extracted from the gTruth objects.
The images in imds contain at least one class of
annotated labels. The function ignores images that are not annotated.
Box label datastore, returned as a boxLabelDatastore object. The datastore contains categorical
vectors for ROI label names and M-by-4 matrices of
M bounding boxes. The locations and sizes of the
bounding boxes are represented as double M-by-4 element
vectors in the format
[x,y,width,height].
Array datastore, returned as a struct array. The fields
of the struct contain the attributes and sublabel names
for the corresponding labels in the box label datastore
blds. The sublabel data is packaged into the
struct with a Position field along
with the fields that correspond to the sublabel attributes.
Training data table, returned as a table with two or more columns. The
first column of the table contains image file names with paths. The images
can be grayscale or truecolor (RGB) and in any format supported by imread. Each of the
remaining columns correspond to an ROI label and contains the locations of
bounding boxes in the image (specified in the first column), for that label.
The bounding boxes are specified as M-by-4 matrices of
M bounding boxes in the format
[x,y,width,height].
[x,y] specifies the upper-left
corner location. To create a ground truth table, you can use the Image
Labeler app or Video
Labeler app.

The output table ignores any sublabel or attribute data
present in the input gTruth object.
Version History
Introduced in R2017aSee Also
Apps
Functions
trainACFObjectDetector|trainYOLOv2ObjectDetector|trainYOLOv3ObjectDetector|trainYOLOv4ObjectDetector|estimateAnchorBoxes
Objects
Topics
- Datastores for Deep Learning (Deep Learning Toolbox)
- Training Data for Object Detection and Semantic Segmentation