trainYOLOv4ObjectDetector
Syntax
Description
detector = trainYOLOv4ObjectDetector(trainingData,detector,options)detector. The input
detector can be an untrained or pretrained YOLO v4 object detector.
The options input specifies training parameters for the detection
network.
You can also use this syntax for fine-tuning a pretrained YOLO v4 object detector.
detector = trainYOLOv4ObjectDetector(trainingData,checkpoint,options)
You can use this syntax to:
Add more training data and continue the training.
Improve training accuracy by increasing the maximum number of iterations.
___ = trainYOLOv4ObjectDetector(___,Name=Value)
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example,
trainYOLOv4ObjectDetector(trainingData,ExperimentManager="none") sets
the metrics to track with Experiment Manager to "none".
Note
To run this function, you will require the Deep Learning Toolbox™.
Examples
This example shows how to fine-tune a pretrained YOLO v4 object detector for detecting vehicles in an image.
Load a tiny YOLO v4 object detector, pretrained on the COCO dataset, and inspect its properties.
detector = yolov4ObjectDetector("tiny-yolov4-coco")detector =
yolov4ObjectDetector with properties:
Network: [1×1 dlnetwork]
AnchorBoxes: {2×1 cell}
ClassNames: {80×1 cell}
InputSize: [416 416 3]
ModelName: 'tiny-yolov4-coco'
The number of anchor boxes must be same the number of output layers in the YOLO v4 network. The tiny YOLO v4 network contains two output layers.
detector.Network
ans =
dlnetwork with properties:
Layers: [74×1 nnet.cnn.layer.Layer]
Connections: [80×2 table]
Learnables: [80×3 table]
State: [38×3 table]
InputNames: {'input_1'}
OutputNames: {'conv_31' 'conv_38'}
Initialized: 1
Prepare Training Data
Load a .mat file containing the vehicle data set to use for training, in which data is stored as a table. The first column contains the training images and the remaining columns contain the labeled bounding boxes.
data = load("vehicleTrainingData.mat");
trainingData = data.vehicleTrainingData;Specify the directory in which to store the training samples. Add the full path to the file names in training data.
dataDir = fullfile(toolboxdir("vision"),"visiondata"); trainingData.imageFilename = fullfile(dataDir,trainingData.imageFilename);
Create an ImageDatastore using the files from the table.
imds = imageDatastore(trainingData.imageFilename);
Create a boxLabelDatastore using the label columns from the table.
blds = boxLabelDatastore(trainingData(:,2:end));
Combine the datastores.
ds = combine(imds,blds);
Specify the input size to use for resizing the training images. The size of the training images must be a multiple of 32 for when you use the tiny-yolov4-coco and csp-darknet53-coco pretrained YOLO v4 deep learning networks. You must also resize the bounding boxes based on the specified input size.
inputSize = [224 224 3];
Resize and rescale the training images and the bounding boxes using the preprocessData helper function. Convert the preprocessed data to a datastore object using the transform function.
trainingDataForEstimation = transform(ds,@(data)preprocessData(data,inputSize));
Estimate Anchor Boxes
Estimate the anchor boxes from the training data. You must assign the same number of anchor boxes to each output layer in the YOLO v4 network.
numAnchors = 6;
[anchors,meanIoU] = estimateAnchorBoxes(trainingDataForEstimation,numAnchors);
area = anchors(:,1).*anchors(:,2);
[~,idx] = sort(area,"descend");
anchors = anchors(idx,:);
anchorBoxes = {anchors(1:3,:);anchors(4:6,:)};Configure and Train YOLO v4 Network
Specify the class names and configure the pretrained YOLO v4 deep learning network to be retrained for the new data set using the yolov4ObjectDetector function.
classes = ["vehicle"]; detector = yolov4ObjectDetector("tiny-yolov4-coco",classes,anchorBoxes,InputSize=inputSize);
Specify the training options and retrain the pretrained YOLO v4 network on the new data set using the trainYOLOv4ObjectDetector function.
options = trainingOptions("sgdm", ... InitialLearnRate=0.001, ... MiniBatchSize=16, ... MaxEpochs=40, ... ResetInputNormalization=false, ... VerboseFrequency=30); trainedDetector = trainYOLOv4ObjectDetector(ds,detector,options);
*************************************************************************
Training a YOLO v4 Object Detector for the following object classes:
* vehicle
Epoch Iteration TimeElapsed LearnRate TrainingLoss
_____ _________ ___________ _________ ____________
2 30 00:01:07 0.001 7.215
4 60 00:01:44 0.001 1.7371
5 90 00:02:21 0.001 0.97954
7 120 00:02:57 0.001 0.59412
8 150 00:03:34 0.001 0.65631
10 180 00:04:10 0.001 1.0774
12 210 00:04:46 0.001 0.4807
13 240 00:05:22 0.001 0.40389
15 270 00:05:59 0.001 0.57931
16 300 00:06:35 0.001 0.90734
18 330 00:07:11 0.001 0.24902
19 360 00:07:48 0.001 0.32441
21 390 00:08:24 0.001 0.23054
23 420 00:09:00 0.001 0.70897
24 450 00:09:36 0.001 0.31744
26 480 00:10:12 0.001 0.36323
27 510 00:10:49 0.001 0.13696
29 540 00:11:25 0.001 0.14913
30 570 00:12:01 0.001 0.37757
32 600 00:12:37 0.001 0.36985
34 630 00:13:14 0.001 0.14034
35 660 00:13:50 0.001 0.14731
37 690 00:14:26 0.001 0.15907
38 720 00:15:03 0.001 0.11737
40 750 00:15:40 0.001 0.1855
*************************************************************************
Detector training complete.
*************************************************************************
Detect Vehicles in Test Image
Load a test image from the workspace.
I = imread("highway.png");Use the fine-tuned YOLO v4 object detector to detect vehicles in the test image and display the detection results.
[bboxes,scores,labels] = detect(trainedDetector,I,Threshold=0.05);
detectedImg = insertObjectAnnotation(I,"Rectangle",bboxes,labels);
figure
imshow(detectedImg)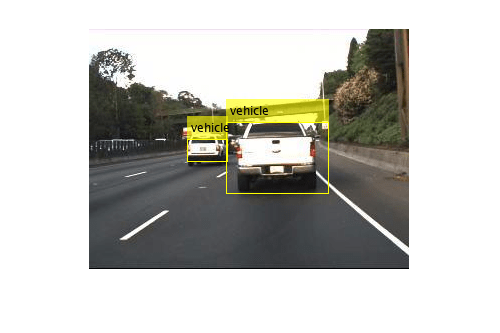
Supporting Functions
function data = preprocessData(data,targetSize) for num = 1:size(data,1) I = data{num,1}; imgSize = size(I); bboxes = data{num,2}; I = im2single(imresize(I,targetSize(1:2))); scale = targetSize(1:2)./imgSize(1:2); bboxes = bboxresize(bboxes,scale); data(num,1:2) = {I,bboxes}; end end
Input Arguments
Labeled ground truth images, specified as a datastore. Data must be set up so that
calling the datastore with the read and readall functions returns a cell array or
table with three columns in the format
{data,boxes,labels}.
The first column, data, must contain the image data, stored as a cell array. The second column, boxes, must contain the bounding boxes. The third column, labels, must be a cell array that contains M-by-1 categorical vectors containing object class names, where M is the number of bounding boxes. All the categorical data returned by the datastore must use the same categories.
The table describes the format of the bounding boxes column.
| Bounding Box | Description |
|---|---|
Axis-aligned rectangle |
Defined in spatial coordinates as an M-by-4 numeric matrix with rows of the form [x y w h], where:
|
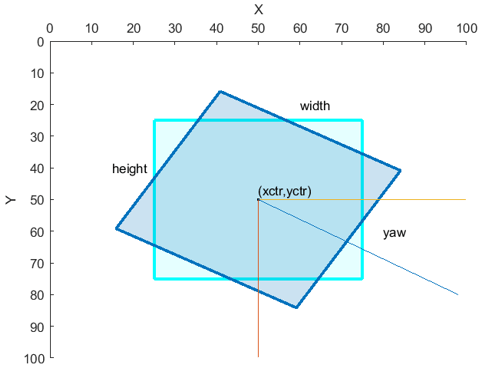
Rotated rectangle |
Defined in spatial coordinates as an M-by-5 numeric matrix with rows of the form [xctr yctr w h yaw], where:
|
For more information, see Datastores for Deep Learning (Deep Learning Toolbox).
Note
A pretrained axis-aligned network can be converted to a rotated rectangle
network by providing rotated rectangle training data. When you provide the rotated
rectangle training data, the trainYOLOv4ObjectDetector function
fine tunes the network heads allowing the rotated rectangle detections to
occur.
Pretrained or untrained YOLO v4 object detector, specified as a yolov4ObjectDetector object.
Training options, specified as a TrainingOptionsSGDM,
TrainingOptionsRMSProp, or TrainingOptionsADAM
object returned by the trainingOptions (Deep Learning Toolbox) function. To specify the
solver name and other options for network training, use the
trainingOptions function.
Note
If you specify the OutputFcn function handle using the OutputFcn (Deep Learning Toolbox)
name-value argument, it must use a per-epoch info structure with
these fields:
EpochIterationTimeElapsedLearnRateTrainingLoss
Saved detector checkpoint, specified as a yolov4ObjectDetector object. To periodically save a detector checkpoint
during training, specify CheckpointPath. To control how frequently
check points are saved see the CheckPointFrequency and
CheckPointFrequencyUnit training options.
To load a checkpoint for a previously trained detector, load the MAT file from the
checkpoint path. For example, if the CheckpointPath property of the
object specified by options is 'checkpath', you
can load a checkpoint MAT file by using this code. 'checkpath' is the
name of a folder in the current working directory to which the detector checkpoint has
to be saved during training.
data = load('checkpath/net_checkpoint__19__2021_12_29__01_04_15.mat');
checkpoint = data.net;The name of the MAT file includes the iteration number and timestamp of when the
detector checkpoint was saved. The detector is saved in the net
variable of the file. Pass this file back into the
trainYOLOv4ObjectDetector function:
yoloDetector = trainYOLOv4ObjectDetector(trainingData,checkpoint,options);
Name-Value Arguments
Output Arguments
Tips
To generate the ground truth, use the Image Labeler or Video Labeler app. To create a table of training data from the generated ground truth, use the
objectDetectorTrainingDatafunction.To improve prediction accuracy,
Increase the number of images you can use to train the network. You can expand the training dataset through data augmentation. For information on how to apply data augmentation for preprocessing, see Preprocess Images for Deep Learning (Deep Learning Toolbox).
Choose anchor boxes appropriate to the dataset for training the network. You can use the
estimateAnchorBoxesfunction to compute anchor boxes directly from the training data.
A pretrained axis-aligned network can be converted to a rotated rectangle network by providing rotated rectangle training data. When you provide the rotated rectangle training data, the
trainYOLOv4ObjectDetectorfunction fine tunes the network heads allowing the rotated rectangle detections to occur.When you train a rotated rectangle bounding box detector, use a learning rate approximately one order of magnitude below that of its axis-aligned counterpart training rate.
When you perform transfer learning using a YOLO v4 object detector, consider freezing the subnetworks using the name-value argument
FreezeSubNetworkto increase training speed and reduce GPU memory consumption.
Extended Capabilities
Version History
Introduced in R2022aSee Also
Apps
Functions
trainingOptions(Deep Learning Toolbox) |yolov4ObjectDetector|objectDetectorTrainingData|trainYOLOXObjectDetector|trainYOLOv2ObjectDetector
Objects
Topics
- Object Detection Using YOLO v4 Deep Learning
- Estimate Anchor Boxes from Training Data
- Object Detection in Large Satellite Imagery Using Deep Learning
- Train Object Detectors in Experiment Manager
- Anchor Boxes for Object Detection
- Datastores for Deep Learning (Deep Learning Toolbox)
- Choose an Object Detector