开环控制
在开环 V/F 控制(或伏特/赫兹控制)中,保持施加的定子电压与电源频率之间的常数比,以使电机的气隙磁通保持在其额定水平。通过保持磁通恒定,电机可以在很宽的工作转速范围内产生其额定转矩,而不会使磁芯饱和或损失效率。在实践中,控制器调整逆变器的输出频率来设置电机转速,同时根据预定义的线性关系按比例缩放电压幅值。为了在非常低的频率下工作,通常会施加电压升压来补偿定子绕组中的电阻压降并确保足够的启动转矩。
I-F 控制可以很好地控制电机启动时的转矩。与开环控制不同,I-F 控制启动电机时不会出现任何电流过冲,并且可以提供从 I-F 控制到闭环控制的平滑过渡。
模块
精选示例

以开环控制方式运行三相 AC 电机并校准 ADC 偏移量
此示例使用开环控制(也称为标量控制或伏特/赫兹控制)来运行电机。这种方法会改变定子电压和频率来控制转子转速,而不使用来自电机的任何反馈。您可以使用这种方法来检查硬件连接的完整性。开环控制的恒速应用使用固定频率的电机电源。开环控制的可调速应用需要可变频率电源来控制转子转速。为了确保恒定的定子磁通,请保持电源电压振幅与其频率成比例。
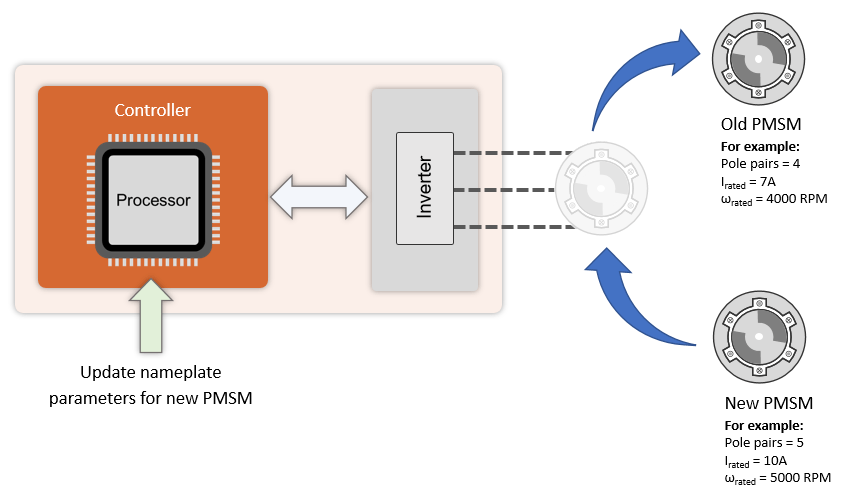
Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.
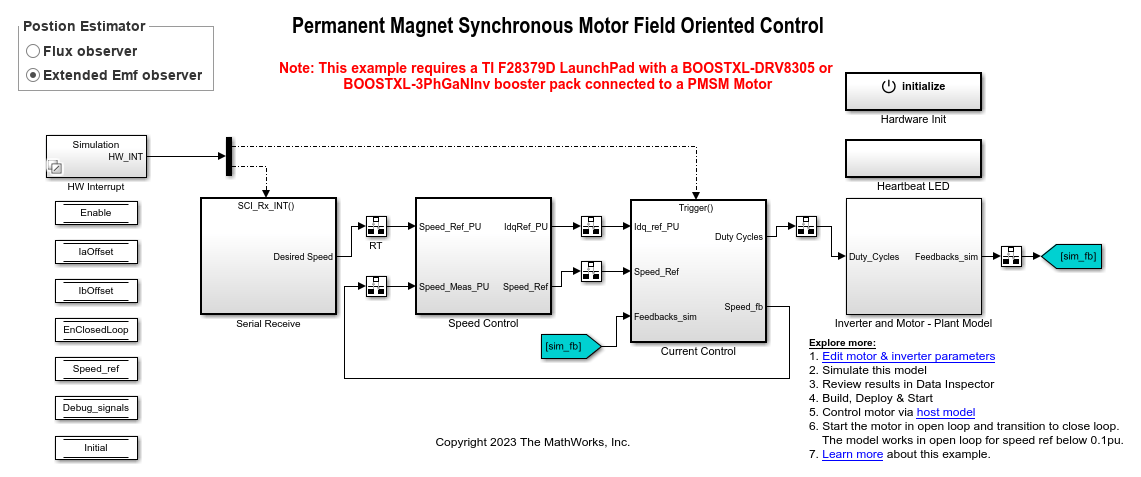
使用基于 I-F 控制的启动的 PMSM 无传感器磁场定向控制
此示例使用无传感器位置估计和基于 I-F 控制的启动来实现磁场定向控制 (FOC),以控制三相永磁同步电机 (PMSM) 的转速。