fsolve
对非线性方程求解
语法
说明
示例
此示例说明如何求解包含两个变量的两个非线性方程。这些方程包括
将方程转换为 形式。
运行此示例时提供的 root2d.m 函数计算这些值。
type root2d.mfunction F = root2d(x) F(1) = exp(-exp(-(x(1)+x(2)))) - x(2)*(1+x(1)^2); F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
从 [0,0] 点开始求解方程组。
fun = @root2d; x0 = [0,0]; x = fsolve(fun,x0)
Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient. <stopping criteria details>
x = 1×2
0.3532 0.6061
深入了解非线性系统的求解过程。
将选项设置为无显示和显示一阶最优性的绘图函数,该函数应在算法迭代时收敛于 0。
options = optimoptions('fsolve','Display','none','PlotFcn',@optimplotfirstorderopt);
非线性系统中的方程是
将方程转换为 形式。
root2d 函数计算这两个方程的左侧。
type root2d.mfunction F = root2d(x) F(1) = exp(-exp(-(x(1)+x(2)))) - x(2)*(1+x(1)^2); F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
从点 [0,0] 开始求解非线性系统,并观察求解过程。
fun = @root2d; x0 = [0,0]; x = fsolve(fun,x0,options)
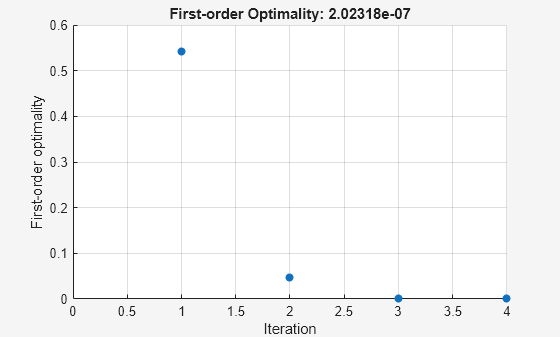
x = 1×2
0.3532 0.6061
您可以按照传递额外参数主题中所述对方程进行参数化。例如,此示例末尾的 paramfun 辅助函数会创建由 参数化的以下方程组:
要将方程组求解为某个特定值(本例中为 ),请在工作区中设置 ,并基于 paramfun 在 x 中创建匿名函数。
c = -1; fun = @(x)paramfun(x,c);
从点 x0 = [0 1] 开始求解方程组。
x0 = [0 1]; x = fsolve(fun,x0)
Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient. <stopping criteria details>
x = 1×2
0.1976 0.4255
要求解 的不同值,请在工作区中输入 并再次创建 fun 函数,使其有新的 值。
c = -2;
fun = @(x)paramfun(x,c); % fun now has the new c value
x = fsolve(fun,x0)Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient. <stopping criteria details>
x = 1×2
0.1788 0.3418
辅助函数
以下代码创建 paramfun 辅助函数。
function F = paramfun(x,c) F = [ 2*x(1) + x(2) - exp(c*x(1)) -x(1) + 2*x(2) - exp(c*x(2))]; end
为 fsolve 创建问题结构体并求解问题。
求解与使用非默认选项的求解中相同的问题,但使用问题结构体来表示问题。
设置问题的相关选项,不显示迭代输出,使用绘图函数显示一阶最优性,一阶最优性应随着算法迭代而收敛于 0。
problem.options = optimoptions('fsolve','Display','none','PlotFcn',@optimplotfirstorderopt);
非线性系统中的方程是
将方程转换为 形式。
root2d 函数计算这两个方程的左侧。
type root2dfunction F = root2d(x) F(1) = exp(-exp(-(x(1)+x(2)))) - x(2)*(1+x(1)^2); F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
在问题结构体中创建其余字段。
problem.objective = @root2d;
problem.x0 = [0,0];
problem.solver = 'fsolve';求解。
x = fsolve(problem)
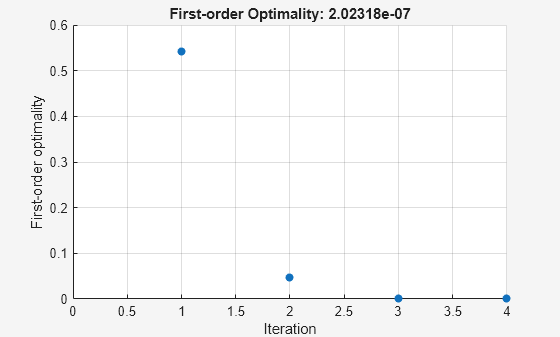
x = 1×2
0.3532 0.6061
此示例返回迭代输出,展示了一个包含两个方程和两个未知数的方程组的求解过程
以 形式重写方程:
从 x0 = [-5 -5] 开始搜索解。
首先,编写一个函数用来计算 F(方程在 x 处的值)。
F = @(x) [2*x(1) - x(2) - exp(-x(1));
-x(1) + 2*x(2) - exp(-x(2))];创建初始点 x0。
x0 = [-5;-5];
设置选项以返回迭代输出。
options = optimoptions('fsolve','Display','iter');
求解方程。
[x,fval] = fsolve(F,x0,options)
Norm of First-order Trust-region
Iteration Func-count ||f(x)||^2 step optimality radius
0 3 47071.2 2.29e+04 1
1 6 12003.4 1 5.75e+03 1
2 9 3147.02 1 1.47e+03 1
3 12 854.452 1 388 1
4 15 239.527 1 107 1
5 18 67.0412 1 30.8 1
6 21 16.7042 1 9.05 1
7 24 2.42788 1 2.26 1
8 27 0.032658 0.759511 0.206 2.5
9 30 7.03149e-06 0.111927 0.00294 2.5
10 33 3.29525e-13 0.00169132 6.36e-07 2.5
Equation solved.
fsolve completed because the vector of function values is near zero
as measured by the value of the function tolerance, and
the problem appears regular as measured by the gradient.
<stopping criteria details>
x = 2×1
0.5671
0.5671
fval = 2×1
10-6 ×
-0.4059
-0.4059
迭代输出显示 f(x),这是函数 F(x) 的范数的平方。随着迭代的进行,该值减小到接近于零。随着迭代的进行,一阶最优性测度同样减小到接近于零。这些条目显示迭代收敛于一个解。有关其他条目的含义,请参阅迭代输出。
fval 输出给出函数值 F(x),该值在解处应为零(在 FunctionTolerance 容差内)。
找到满足下式的矩阵
,
初始点为 x0 = [1,1;1,1]。创建匿名函数来计算矩阵方程并创建点 x0。
fun = @(x)x*x*x - [1,2;3,4]; x0 = ones(2);
将选项设置为不显示。
options = optimoptions('fsolve','Display','off');
检查 fsolve 输出,了解求解过程和解的质量。
[x,fval,exitflag,output] = fsolve(fun,x0,options)
x = 2×2
-0.1291 0.8602
1.2903 1.1612
fval = 2×2
10-9 ×
-0.2742 0.1258
0.1876 -0.0864
exitflag = 1
output = struct with fields:
iterations: 11
funcCount: 52
algorithm: 'trust-region-dogleg'
firstorderopt: 4.0197e-10
message: 'Equation solved.↵↵fsolve completed because the vector of function values is near zero↵as measured by the value of the function tolerance, and↵the problem appears regular as measured by the gradient.↵↵<stopping criteria details>↵↵Equation solved. The sum of squared function values, r = 1.336702e-19, is less than↵sqrt(options.FunctionTolerance) = 1.000000e-03. The relative norm of the gradient of r,↵4.019681e-10, is less than options.OptimalityTolerance = 1.000000e-06.'
退出标志值 1 表示解是可靠的。要手动验证解的可靠性,请计算残差(fval 的平方和)并观察它与零的接近程度。
sum(sum(fval.*fval))
ans = 1.3367e-19
这里残差很小,证实 x 是一个解。
您可以在 output 结构体中看到 fsolve 执行了多少次迭代和函数计算才求得解。
输入参数
输出参量
限制
要求解的函数必须为连续的。
成功求解后,
fsolve只给出一个根。仅当方程组为方阵(即方程的数目等于未知数的数目)时,才使用默认的信赖域 dogleg 方法。如使用莱文贝格-马夸特方法,方程组不必为方阵。
详细信息
提示
对于大型问题,即变量数以千计、甚至更多的问题,将
Algorithm选项设置为'trust-region'并将SubproblemAlgorithm选项设置为'cg'以节省内存(同时也可能节省时间)。
算法
莱文贝格-马夸特和信赖域方法基于非线性最小二乘算法,该算法在 lsqnonlin 中也有使用。如果方程组不能包含零,请使用这些方法之一。该算法仍返回残差很小的点。然而,如果方程组的雅可比矩阵是奇异的,则算法收敛到的点可能并非方程组的解(请参阅限制)。
默认情况下,
fsolve选择信赖域 dogleg 算法。该算法是 [8] 中所述的鲍威尔 dogleg 方法的变体。它在本质上类似于在 [7] 中实现的算法。请参阅信赖域 dogleg 算法。信赖域算法是一种子空间信赖域方法,基于 [1] 和 [2] 中所述的内部反射牛顿法。每次迭代都涉及使用预条件共轭梯度法 (PCG) 来近似求解大型线性系统。请参阅信赖域算法。
参考文献 [4]、[5] 和 [6] 中描述了莱文贝格-马夸特方法。请参阅莱文贝格-马夸特方法。
替代功能
App
优化实时编辑器任务为 fsolve 提供了一个可视化界面。
参考
[1] Coleman, T.F. and Y. Li, “An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds,” SIAM Journal on Optimization, Vol. 6, pp. 418-445, 1996.
[2] Coleman, T.F. and Y. Li, “On the Convergence of Reflective Newton Methods for Large-Scale Nonlinear Minimization Subject to Bounds,” Mathematical Programming, Vol. 67, Number 2, pp. 189-224, 1994.
[3] Dennis, J. E. Jr., “Nonlinear Least-Squares,” State of the Art in Numerical Analysis, ed. D. Jacobs, Academic Press, pp. 269-312.
[4] Levenberg, K., “A Method for the Solution of Certain Problems in Least-Squares,” Quarterly Applied Mathematics 2, pp. 164-168, 1944.
[5] Marquardt, D., “An Algorithm for Least-squares Estimation of Nonlinear Parameters,” SIAM Journal Applied Mathematics, Vol. 11, pp. 431-441, 1963.
[6] Moré, J. J., “The Levenberg-Marquardt Algorithm: Implementation and Theory,” Numerical Analysis, ed. G. A. Watson, Lecture Notes in Mathematics 630, Springer Verlag, pp. 105-116, 1977.
[7] Moré, J. J., B. S. Garbow, and K. E. Hillstrom, User Guide for MINPACK 1, Argonne National Laboratory, Rept. ANL-80-74, 1980.
[8] Powell, M. J. D., “A Fortran Subroutine for Solving Systems of Nonlinear Algebraic Equations,” Numerical Methods for Nonlinear Algebraic Equations, P. Rabinowitz, ed., Ch.7, 1970.