lsqnonlin
求解非线性最小二乘(非线性数据拟合)问题
语法
说明
非线性最小二乘求解器
求解以下形式的非线性最小二乘曲线拟合问题
需满足以下约束
x、lb 和 ub 可以是向量或矩阵;请参阅矩阵参量。
不要将目标函数指定为标量值 (平方和)。lsqnonlin 要求目标函数是向量值函数
示例
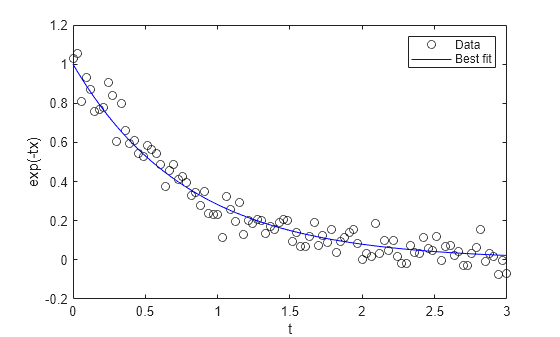
对数据进行简单的指数衰减曲线拟合。
从添加了噪声的指数衰减模型生成数据。模型是
其中 的范围是从 0 到 3, 是均值为 0、标准差为 0.05 的正态分布噪声。
rng default % for reproducibility d = linspace(0,3); y = exp(-1.3*d) + 0.05*randn(size(d));
问题表述为:给定数据(d、y),求出与数据拟合最佳的指数衰减率。
创建一个匿名函数,该函数接受指数衰减率 的值作为输入,并返回采用该衰减率的模型与数据之差组成的向量。
fun = @(r)exp(-d*r)-y;
找到最佳衰减率的值。任意选择一个初始估计值 x0 = 4。
x0 = 4; x = lsqnonlin(fun,x0)
Local minimum possible. lsqnonlin stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance. <stopping criteria details>
x = 1.2645
绘制数据和最佳拟合指数曲线。
plot(d,y,'ko',d,exp(-x*d),'b-') legend('Data','Best fit') xlabel('t') ylabel('exp(-tx)')
当某些拟合参数有边界时,找到最佳拟合模型。
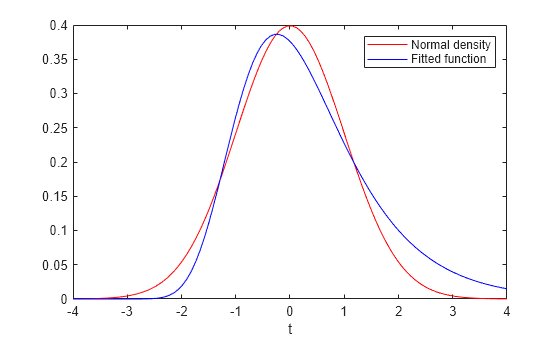
找到合适的中心化参数 和缩放参数 ,以便以下函数
最好地拟合以下标准正态密度分布:
创建数据点组成的向量 t,以及在这些点上的对应正态密度。
t = linspace(-4,4); y = 1/sqrt(2*pi)*exp(-t.^2/2);
创建一个缩放参数 为 x(1) 且中心化参数 为 x(2) 的函数,来计算中心化并缩放的函数与正态 y 之间的差。
fun = @(x)x(1)*exp(-t).*exp(-exp(-(t-x(2)))) - y;
从 x0 = [1/2,0] 开始寻找最佳拟合,缩放参数 的值介于 1/2 和 3/2 之间,中心化参数 的值介于 -1 和 3 之间。
lb = [1/2,-1]; ub = [3/2,3]; x0 = [1/2,0]; x = lsqnonlin(fun,x0,lb,ub)
Local minimum possible. lsqnonlin stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance. <stopping criteria details>
x = 1×2
0.8231 -0.2444
绘制这两个函数来查看拟合的质量。
plot(t,y,'r-',t,fun(x)+y,'b-') xlabel('t') legend('Normal density','Fitted function')
以下列目标函数为例(求平方和):
此目标函数的代码在此示例末尾显示为 myfun 函数。
在满足线性约束 的条件下最小化此函数。将此约束编写为 。
A = [1 -1/2]; b = 0;
施加边界 、、 和 。
lb = [0 0]; ub = [2 4];
从点 x0 = [0.3 0.4] 启动优化过程。
x0 = [0.3 0.4];
此问题没有线性等式约束。
Aeq = []; beq = [];
运行优化。
x = lsqnonlin(@myfun,x0,lb,ub,A,b,Aeq,beq)
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
0.1695 0.3389
function F = myfun(x) k = 1:10; F = 2 + 2*k - exp(k*x(1)) - 2*exp(2*k*(x(2)^2)); end
以下列目标函数为例(求平方和):
此目标函数的代码在此示例末尾显示为 myfun 函数。
在满足非线性约束 的条件下最小化此函数。此非线性约束函数的代码在此示例末尾显示为 nlcon 函数。
施加边界 、、 和 。
lb = [0 0]; ub = [2 4];
从点 x0 = [0.3 0.4] 启动优化过程。
x0 = [0.3 0.4];
该问题没有线性约束。
A = []; b = []; Aeq = []; beq = [];
运行优化。
x = lsqnonlin(@myfun,x0,lb,ub,A,b,Aeq,beq,@nlcon)
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
0.2133 0.3266
function F = myfun(x) k = 1:10; F = 2 + 2*k - exp(k*x(1)) - 2*exp(2*k*(x(2)^2)); end function [c,ceq] = nlcon(x) ceq = []; c = sin(x(1)) - cos(x(2)); end
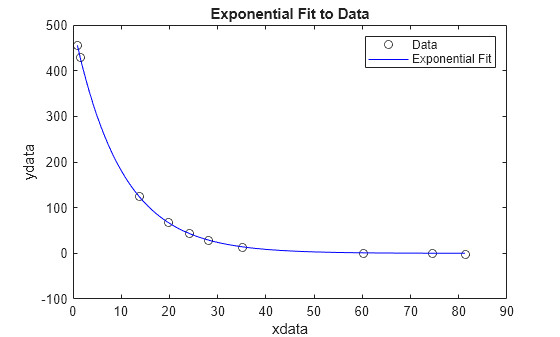
比较使用不同 lsqnonlin 算法求解数据拟合问题的结果。
假设您有观测时间数据 xdata 和观测响应数据 ydata,并且要求得参数 和 以拟合以下形式的模型
输入观测时间和响应。
xdata = ... [0.9 1.5 13.8 19.8 24.1 28.2 35.2 60.3 74.6 81.3]; ydata = ... [455.2 428.6 124.1 67.3 43.2 28.1 13.1 -0.4 -1.3 -1.5];
创建简单的指数衰减模型。该模型计算预测值和观测值之间的差组成的向量。
fun = @(x)x(1)*exp(x(2)*xdata)-ydata;
以 x0 = [100,-1] 为起点拟合模型。首先,使用默认的 'trust-region-reflective' 算法。
x0 = [100,-1]; options = optimoptions(@lsqnonlin,'Algorithm','trust-region-reflective'); x = lsqnonlin(fun,x0,[],[],options)
Local minimum possible. lsqnonlin stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance. <stopping criteria details>
x = 1×2
498.8309 -0.1013
使用 'levenberg-marquardt' 算法查看是否有任何不同。
options.Algorithm = 'levenberg-marquardt';
x = lsqnonlin(fun,x0,[],[],options)Local minimum possible. lsqnonlin stopped because the relative size of the current step is less than the value of the step size tolerance. <stopping criteria details>
x = 1×2
498.8309 -0.1013
这两种算法找到相同的解。绘制解和数据。
plot(xdata,ydata,'ko') hold on tlist = linspace(xdata(1),xdata(end)); plot(tlist,x(1)*exp(x(2)*tlist),'b-') xlabel xdata ylabel ydata title('Exponential Fit to Data') legend('Data','Exponential Fit') hold off
求最小化下式的
,
并求最小平方和的值。
由于 lsqnonlin 假设平方和不在用户定义的函数中显式得出,因此传递给 lsqnonlin 的函数应计算向量值函数
,
其中 到 (即 应包含 个分量)。
myfun 函数位于此示例末尾,它用于计算包含 10 个分量的向量 F。
从 x0 = [0.3,0.4] 点开始,求最小化点和对应的最小值。
x0 = [0.3,0.4]; [x,resnorm] = lsqnonlin(@myfun,x0)
Local minimum possible. lsqnonlin stopped because the size of the current step is less than the value of the step size tolerance. <stopping criteria details>
x = 1×2
0.2578 0.2578
resnorm = 124.3622
resnorm 输出是残差范数的平方,或函数值的平方和。
以下函数计算向量值目标函数。
function F = myfun(x) k = 1:10; F = 2 + 2*k-exp(k*x(1))-exp(k*x(2)); end
在求解过程发生时和发生后都对其进行检查(通过将 Display 选项设置为 'iter' 在发生时进行检查,通过检查 output 结构体在发生后进行检查)。
假设您有观测时间数据 xdata 和观测响应数据 ydata,并且要求得参数 和 以拟合以下形式的模型
输入观测时间和响应。
xdata = ... [0.9 1.5 13.8 19.8 24.1 28.2 35.2 60.3 74.6 81.3]; ydata = ... [455.2 428.6 124.1 67.3 43.2 28.1 13.1 -0.4 -1.3 -1.5];
创建简单的指数衰减模型。该模型计算预测值和观测值之间的差组成的向量。
fun = @(x)x(1)*exp(x(2)*xdata)-ydata;
以 x0 = [100,-1] 为起点拟合模型。通过将 Display 选项设置为 'iter' 来检查求解过程。获取 output 结构体以获取有关求解过程的详细信息。
x0 = [100,-1]; options = optimoptions('lsqnonlin','Display','iter'); [x,resnorm,residual,exitflag,output] = lsqnonlin(fun,x0,[],[],options);
Norm of First-order
Iteration Func-count Resnorm step optimality
0 3 359677 2.88e+04
Objective function returned Inf; trying a new point...
1 6 359677 11.6976 2.88e+04
2 9 321395 0.5 4.97e+04
3 12 321395 1 4.97e+04
4 15 292253 0.25 7.06e+04
5 18 292253 0.5 7.06e+04
6 21 270350 0.125 1.15e+05
7 24 270350 0.25 1.15e+05
8 27 252777 0.0625 1.63e+05
9 30 252777 0.125 1.63e+05
10 33 243877 0.03125 7.48e+04
11 36 243660 0.0625 8.7e+04
12 39 243276 0.0625 2e+04
13 42 243174 0.0625 1.14e+04
14 45 242999 0.125 5.1e+03
15 48 242661 0.25 2.04e+03
16 51 241987 0.5 1.91e+03
17 54 240643 1 1.04e+03
18 57 237971 2 3.36e+03
19 60 232686 4 6.04e+03
20 63 222354 8 1.2e+04
21 66 202592 16 2.25e+04
22 69 166443 32 4.05e+04
23 72 106320 64 6.68e+04
24 75 28704.7 128 8.31e+04
25 78 89.7947 140.674 2.22e+04
26 81 9.57381 2.02599 684
27 84 9.50489 0.0619927 2.27
28 87 9.50489 0.000462261 0.0114
Local minimum possible.
lsqnonlin stopped because the final change in the sum of squares relative to
its initial value is less than the value of the function tolerance.
<stopping criteria details>
检查输出结构体以获得有关求解过程的详细信息。
output
output = struct with fields:
firstorderopt: 0.0114
iterations: 28
funcCount: 87
cgiterations: 0
algorithm: 'trust-region-reflective'
stepsize: 4.6226e-04
message: 'Local minimum possible.↵↵lsqnonlin stopped because the final change in the sum of squares relative to ↵its initial value is less than the value of the function tolerance.↵↵<stopping criteria details>↵↵Optimization stopped because the relative sum of squares (r) is changing↵by less than options.FunctionTolerance = 1.000000e-06.'
bestfeasible: []
constrviolation: []
为便于比较,请将 Algorithm 选项设置为 'levenberg-marquardt'。
options.Algorithm = 'levenberg-marquardt';
[x,resnorm,residual,exitflag,output] = lsqnonlin(fun,x0,[],[],options); First-order Norm of
Iteration Func-count Resnorm optimality Lambda step
0 3 359677 2.88e+04 0.01
Objective function returned Inf; trying a new point...
1 13 340761 3.91e+04 100000 0.280777
2 16 304661 5.97e+04 10000 0.373146
3 21 297292 6.55e+04 1e+06 0.0589933
4 24 288240 7.57e+04 100000 0.0645444
5 28 275407 1.01e+05 1e+06 0.0741266
6 31 249954 1.62e+05 100000 0.094571
7 36 245896 1.35e+05 1e+07 0.0133606
8 39 243846 7.26e+04 1e+06 0.0094431
9 42 243568 5.66e+04 100000 0.0082162
10 45 243424 1.61e+04 10000 0.00777935
11 48 243322 8.8e+03 1000 0.0673933
12 51 242408 5.1e+03 100 0.675209
13 54 233628 1.05e+04 10 6.59804
14 57 169089 8.51e+04 1 54.6992
15 60 30814.7 1.54e+05 0.1 196.939
16 63 147.496 8e+03 0.01 129.795
17 66 9.51503 117 0.001 9.96069
18 69 9.50489 0.0714 0.0001 0.080486
19 72 9.50489 5.23e-05 1e-05 5.07043e-05
Local minimum possible.
lsqnonlin stopped because the relative size of the current step is less than
the value of the step size tolerance.
<stopping criteria details>
'levenberg-marquardt' 经过较少迭代次数即实现收敛,但迭代次数与函数计算次数几乎相同:
output
output = struct with fields:
iterations: 19
funcCount: 72
stepsize: 5.0704e-05
cgiterations: []
firstorderopt: 5.2319e-05
algorithm: 'levenberg-marquardt'
message: 'Local minimum possible.↵lsqnonlin stopped because the relative size of the current step is less than↵the value of the step size tolerance.↵↵<stopping criteria details>↵↵Optimization stopped because the relative norm of the current step, 1.016463e-07,↵is less than options.StepTolerance = 1.000000e-06.'
bestfeasible: []
constrviolation: []
输入参数
输出参量
限制
信赖域反射算法不能求解欠定方程组;它要求方程个数(即 F 的行维度)至少与变量个数一样。在欠定的情况下,
lsqnonlin使用莱文贝格-马夸特算法。lsqnonlin可以直接求解复数值问题。请注意,约束对于复数值没有意义,因为复数不能很好地排序;询问一个复数值是大于还是小于另一个复数值没有意义。对于具有边界约束的复数问题,请将变量分成实部和虚部。不要对复数数据使用'interior-point'算法。请参阅对复数值数据进行模型拟合。信赖域反射方法的预条件共轭梯度部分中使用的预条件子计算在计算预条件子之前形成 JTJ(其中 J 是雅可比矩阵)。因此,如果 J 的一行包含许多非零值(这会导致近乎稠密的乘积 JTJ),则可能导致大型问题的求解过程成本高昂。
如果 x 的分量没有上界(或下界),
lsqnonlin更倾向于ub(或lb)的对应分量设置为inf(对于下界,则为-inf),而不是任意但非常大的正数(对于下界,则为负数)。
您可以在 lsqnonlin、lsqcurvefit、fsolve 中使用信赖域反射算法求解中小规模问题,而无需计算 fun 中的雅可比矩阵或提供雅可比矩阵稀疏模式。(这也适用于使用 fmincon 或 fminunc 而不计算黑塞矩阵或提供黑塞矩阵稀疏模式的情况。)中小规模有多小?没有绝对的答案,因为这取决于您的计算机系统配置中的虚拟内存量。
假设您的问题有 m 个方程和 n 个未知数。如果命令 J = sparse(ones(m,n)) 导致您的计算机上出现 Out of memory 错误,则这肯定是因为问题太大。即使它没有导致错误,问题仍可能太大。只有运行它并查看 MATLAB 是否在系统可用的虚拟内存量内运行,您才能找到答案。
详细信息
算法
莱文贝格-马夸特和信赖域反射方法基于非线性最小二乘算法,这些算法也在 fsolve 中使用。
'interior-point' 算法使用 fmincon 'interior-point' 算法,但有一些修正。有关详细信息,请参阅针对约束最小二乘修正的 fmincon 算法。
替代功能
App
优化实时编辑器任务为 lsqnonlin 提供了一个可视化界面。
参考
[1] Coleman, T.F. and Y. Li. “An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds.” SIAM Journal on Optimization, Vol. 6, 1996, pp. 418–445.
[2] Coleman, T.F. and Y. Li. “On the Convergence of Reflective Newton Methods for Large-Scale Nonlinear Minimization Subject to Bounds.” Mathematical Programming, Vol. 67, Number 2, 1994, pp. 189–224.
[3] Dennis, J. E. Jr. “Nonlinear Least-Squares.” State of the Art in Numerical Analysis, ed. D. Jacobs, Academic Press, pp. 269–312.
[4] Levenberg, K. “A Method for the Solution of Certain Problems in Least-Squares.” Quarterly Applied Mathematics 2, 1944, pp. 164–168.
[5] Marquardt, D. “An Algorithm for Least-squares Estimation of Nonlinear Parameters.” SIAM Journal Applied Mathematics, Vol. 11, 1963, pp. 431–441.
[6] Moré, J. J. “The Levenberg-Marquardt Algorithm: Implementation and Theory.” Numerical Analysis, ed. G. A. Watson, Lecture Notes in Mathematics 630, Springer Verlag, 1977, pp. 105–116.
[7] Moré, J. J., B. S. Garbow, and K. E. Hillstrom. User Guide for MINPACK 1. Argonne National Laboratory, Rept. ANL–80–74, 1980.
[8] Powell, M. J. D. “A Fortran Subroutine for Solving Systems of Nonlinear Algebraic Equations.” Numerical Methods for Nonlinear Algebraic Equations, P. Rabinowitz, ed., Ch.7, 1970.