高斯过程回归
App
| 回归学习器 | 使用有监督机器学习训练回归模型来预测数据 |
模块
| RegressionGP Predict | Predict responses using Gaussian process (GP) regression model (自 R2022a 起) |
函数
对象
RegressionGP | Gaussian process regression model |
CompactRegressionGP | Compact Gaussian process regression model class |
RegressionPartitionedGP | Cross-validated Gaussian process regression (GPR) model (自 R2022b 起) |
RegressionChainEnsemble | Multiresponse regression model (自 R2024b 起) |
CompactRegressionChainEnsemble | Compact multiresponse regression model (自 R2024b 起) |
主题
- 高斯过程回归模型
高斯过程回归 (GPR) 模型是基于核的非参数化概率模型。
- Kernel (Covariance) Function Options
In Gaussian processes, the covariance function expresses the expectation that points with similar predictor values will have similar response values.
- Exact GPR Method
Learn the parameter estimation and prediction in exact GPR method.
- Subset of Data Approximation for GPR Models
With large data sets, the subset of data approximation method can greatly reduce the time required to train a Gaussian process regression model.
- Subset of Regressors Approximation for GPR Models
The subset of regressors approximation method replaces the exact kernel function by an approximation.
- Fully Independent Conditional Approximation for GPR Models
The fully independent conditional (FIC) approximation is a way of systematically approximating the true GPR kernel function in a way that avoids the predictive variance problem of the SR approximation while still maintaining a valid Gaussian process.
- Block Coordinate Descent Approximation for GPR Models
Block coordinate descent approximation is another approximation method used to reduce computation time with large data sets.
- Predict Responses Using RegressionGP Predict Block
Train a Gaussian process (GP) regression model, and then use the RegressionGP Predict block for response prediction.
精选示例
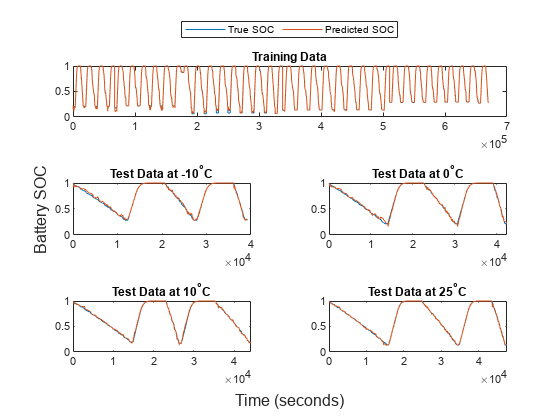
Predict Battery State of Charge Using Machine Learning
Train a Gaussian process regression model to predict the state of charge of a battery in automotive engineering.