状态空间控制设计
状态空间控制设计方法,如 LQG/LQR 和极点配置算法,适用于 MIMO 设计。
函数
主题
- 线性二次高斯 (LQG) 设计
线性二次高斯 (LQG) 控制是一种状态空间方法,您可以使用它来权衡调节/跟踪器性能和控制力度,并考虑过程扰动和测量噪声。
- LQG Regulation: Rolling Mill Case Study
Use linear-quadratic-Gaussian techniques to regulate the beam thickness in a steel rolling mill.
- Design LQG Tracker Using Control System Designer
Design a feedback controller for a disk drive read/write head using LQG synthesis.
- Design Yaw Damper for Jet Transport
This case study illustrates the classical design process.
- 设计 LQG 调节器
为含噪系统中的被控对象输出设计一款 LQG 调节器。
- 设计 LQG 伺服控制器
用卡尔曼状态估计器设计一款 LQG 伺服控制器。
- 在 Simulink 中设计 LQR 伺服控制器
为在 Simulink® 中建模的系统设计一款 LQR 控制器。
- 极点配置
闭环极点位置会直接影响上升时间、稳定时间和瞬变振荡等时间响应特征。极点配置使用状态空间方法来分配闭环极点。
精选示例
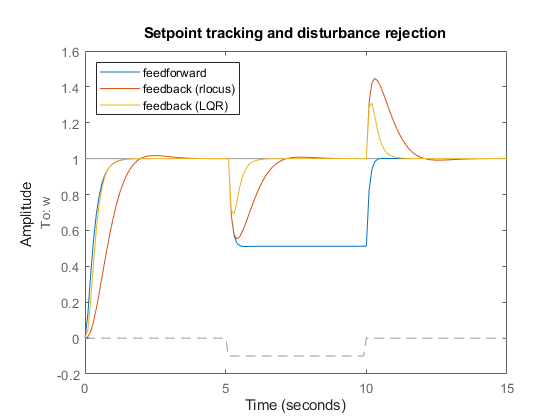
DC 电机控制
比较用于跟踪设定点命令和降低对负载扰动的灵敏度的三种 DC 电机控制方法。
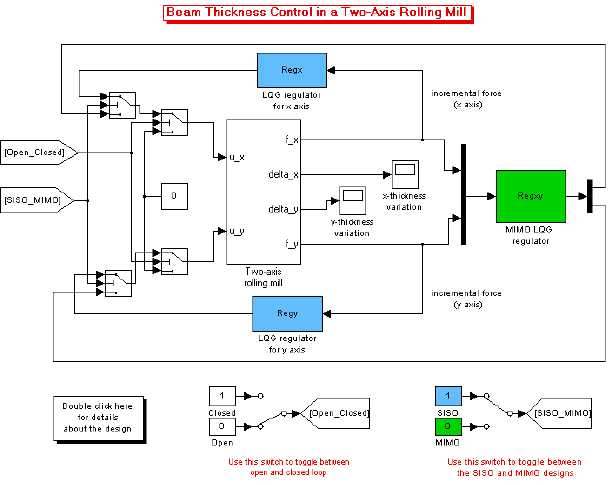
Thickness Control for a Steel Beam
Design a MIMO LQG regulator to control the horizontal and vertical thickness of a steel beam in a hot steel rolling mill.
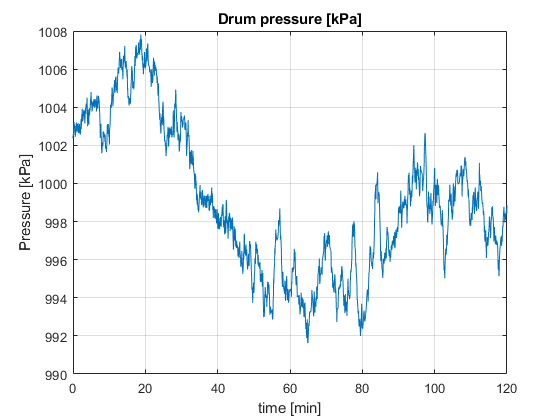
Regulate Pressure in Drum Boiler
Use Simulink® Control Design™ software, using a drum boiler as an example application. Using the operating point search function, the example illustrates model linearization as well as subsequent state observer and LQR design. In this drum-boiler model, the control problem is to regulate boiler pressure in the face of random heat fluctuations from the furnace by adjusting the feed water flow rate and the nominal heat applied. For this example, 95% of the random heat fluctuations are less than 50% of the nominal heating value, which is not unusual for a furnace-fired boiler.