zplane
离散时间滤波器 System object 的 Z 平面零极点图
说明
zplane( 绘制滤波器 System object™ sysobj)sysobj 的零极点,并以单位圆作为参考。在绘图上,每个零点用 'o' 表示,每个极点用 'x' 表示。多个零极点由零点或极点右上角显示的重数表示。
当您使用定点输入运行滤波器 System object 时,滤波器变为量化定点滤波器 filtQuant。当 filtQuant 是量化滤波器时,zplane(filtQuant) 绘制量化和未量化滤波器的零极点。符号  和
和 + 表示量化滤波器 filtQuant 的零极点。绘图包括单位圆作为参考。
示例
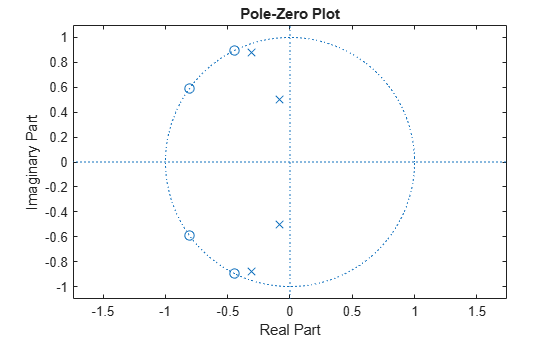
创建一个截止频率为 0.6 的四阶 IIR 数字滤波器。绘制此滤波器的零极点。
[b,a] = ellip(4,.5,20,.6); zplane(b,a)
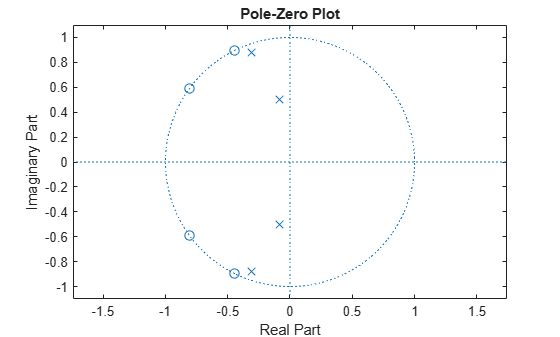
通过将定点输入传递给滤波器算法来量化滤波器。绘制与此滤波器相关联的量化和未量化零极点。
iirFilt = dsp.IIRFilter(Numerator=b,Denominator=a); in = fi(randn(15,6),1,15,3); out = iirFilt(in); zplane(iirFilt)