Motor Control Blockset 快速入门
Motor Control Blockset™ 提供 Simulink® 模块和参考示例,用于在目标微控制器、FPGA 或片上系统 (SoC) 上开发和部署优化的 C 和 HDL 代码形式的电机控制算法。使用克拉克和帕克变换、每安培最大转矩 (MTPA)、六步换相和基于查找表 (LUT) 的弱磁控制模块来构建电机控制算法。您可以使用传感器解码器模块处理来自编码器、霍尔传感器和旋转变压器的信号,或使用估计器模块实现无传感器控制来计算转子位置和转速。这些模块生成的代码可用于涉及 MISRA C™ 和 ISO® 26262 功能安全标准的工作流。
Motor Control Blockset 中的参考示例有助于您理解如何使用桌面和实时仿真来开发、调节和验证电机控制算法。示例包括用于感应电机、开关磁阻电机 (SRM)、同步电机(如无刷 DC 电机 (BLDC))以及表贴式和内置式永磁同步电机 (PMSM) 的闭环电机控制算法。您可以重用相同的算法来生成生产就绪的紧凑且可追溯的定点或浮点代码。借助参考示例,您还可以为该模块集支持的电机控制硬件套件实现算法。
教程
- 创建和验证电机控制系统的模型
创建、部署和验证电机控制系统的控制算法。
- 使用 Motor Control Blockset 参数估计工具估计电机参数
使用 Motor Control Blockset 中的参数估计功能估计电机参数。
- Program Control Flow of Motor Control Blockset Examples
Design control flow of field-oriented control algorithm.
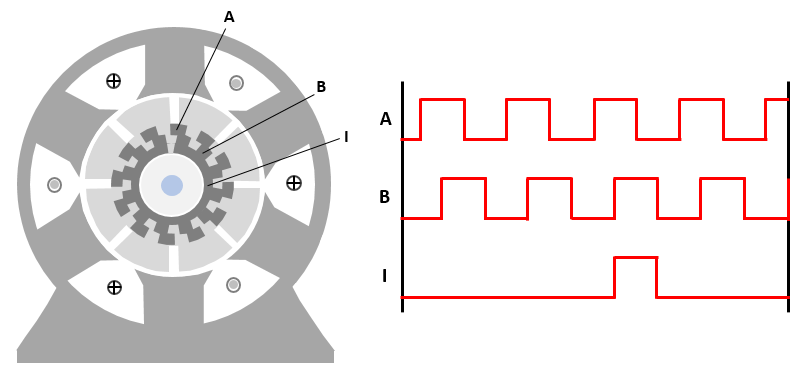
- How to Use Hall Validity and Hall Speed and Position Blocks
Integrate Hall Validity and Hall Decoder blocks with field-oriented control (FOC) algorithm.
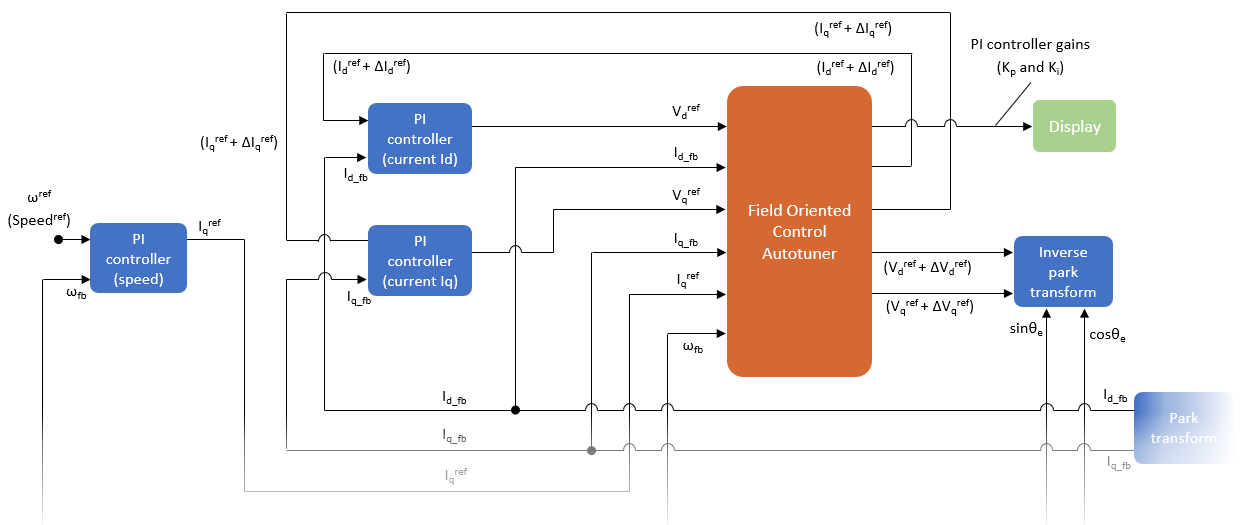
- How to Use Field Oriented Control Autotuner Block
Use the Field Oriented Control Autotuner block to tune PI control loops in field-oriented control applications.
- How to Tune Sensorless Position Estimators
Tune sensorless position estimators for accurate position and speed measurements.
- 硬件连接
将电机、传感器和电源连接到硬件板上。
- 模型配置参数
配置 Simulink 模型以与支持的目标硬件对接。
关于电机控制
- 开环和闭环电机控制方法
描述开环、闭环电机控制,以及从开环到闭环控制的转换。 - 磁场定向控制
使用磁场定向控制实现 PMSM 和感应电机的转速控制。 - Field-Weakening Control
Implement control for speeds above base speed for PMSM and induction motor by using field-weakening control. - 六步换相
使用六步换相法实现 BLDC 电机的转速控制。 - 直接转矩控制 (DTC)
通过控制电机磁通和转矩来实现 PMSM 的转速控制。 - Host-Target Communication
Describes host model, target model, and how they communicate. - Current Sensor ADC Offset and Position Sensor Calibration
Describes offsets for Hall sensor, quadrature encoder, and current sensor ADC. - 标幺制
使用基值定义归一化单位制。
电机控制算法
嵌入式系统的实现、校准和调试方法
精选示例

以开环控制方式运行三相 AC 电机并校准 ADC 偏移量
此示例使用开环控制(也称为标量控制或伏特/赫兹控制)来运行电机。这种方法会改变定子电压和频率来控制转子转速,而不使用来自电机的任何反馈。您可以使用这种方法来检查硬件连接的完整性。开环控制的恒速应用使用固定频率的电机电源。开环控制的可调速应用需要可变频率电源来控制转子转速。为了确保恒定的定子磁通,请保持电源电压振幅与其频率成比例。
使用转速传感器实现感应电机的磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相 AC 感应电机 (ACIM) 的转速。FOC 算法需要转子转速反馈,在此示例中通过使用正交编码器获得此反馈。有关 FOC 的详细信息,请参阅磁场定向控制。

使用霍尔传感器的 PMSM 的磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。FOC 算法需要转子位置反馈,通过使用霍尔传感器获得该反馈。有关 FOC 的详细信息,请参阅磁场定向控制。

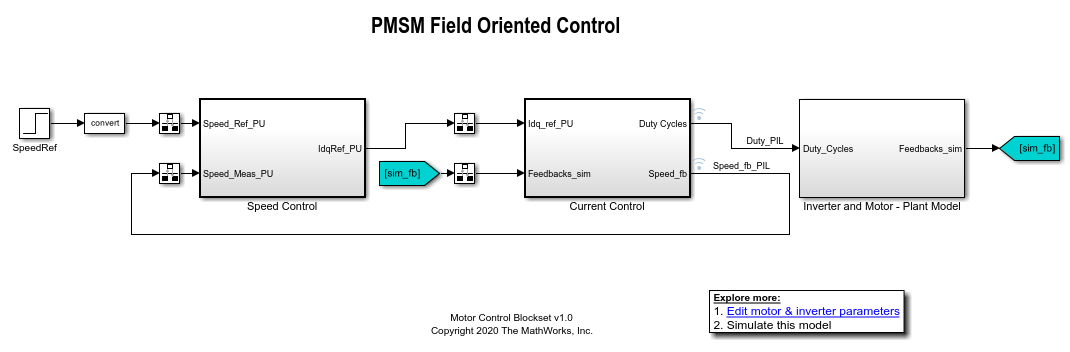
使用 SI 单位的 PMSM 磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。然而,此示例中的 FOC 算法使用信号的 SI 单位来执行计算,而不使用数量的标幺表示(有关标幺制的详细信息,请参阅标幺制)。以下是信号及其 SI 单位:
使用 Field Oriented Control Autotuner 调节 PI 控制器
此示例通过使用 Field Oriented Control Autotuner 模块计算转速和电流控制环中可用的 PI 控制器的增益值。有关此模块的详细信息,请参阅Field Oriented Control Autotuner。有关磁场定向控制的详细信息,请参阅磁场定向控制。
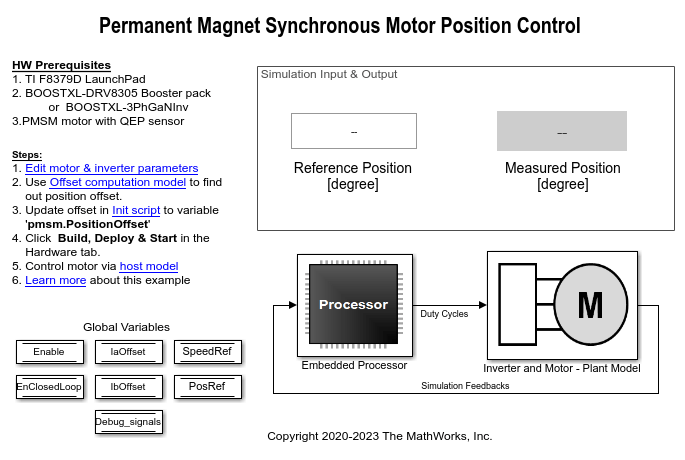
使用正交编码器实现 PMSM 的位置控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的位置。FOC 算法需要从正交编码器获得转子位置反馈。
使用 PIL 测试进行代码验证和探查
此示例说明如何在 Texas Instruments® LAUNCHXL-F28379 硬件板上进行 PIL 探查。在处理器在环 (PIL) 仿真中,控制算法在目标硬件中执行,但被控对象模型在主机上运行。被控对象模型对控制器的输入和输出信号进行仿真,并使用串行通信接口与控制器通信。借助此功能,您可以使用 PIL 仿真来确定目标硬件上的执行时间,然后可以将其与主机上仿真模型的执行时间相比较。
交互式学习
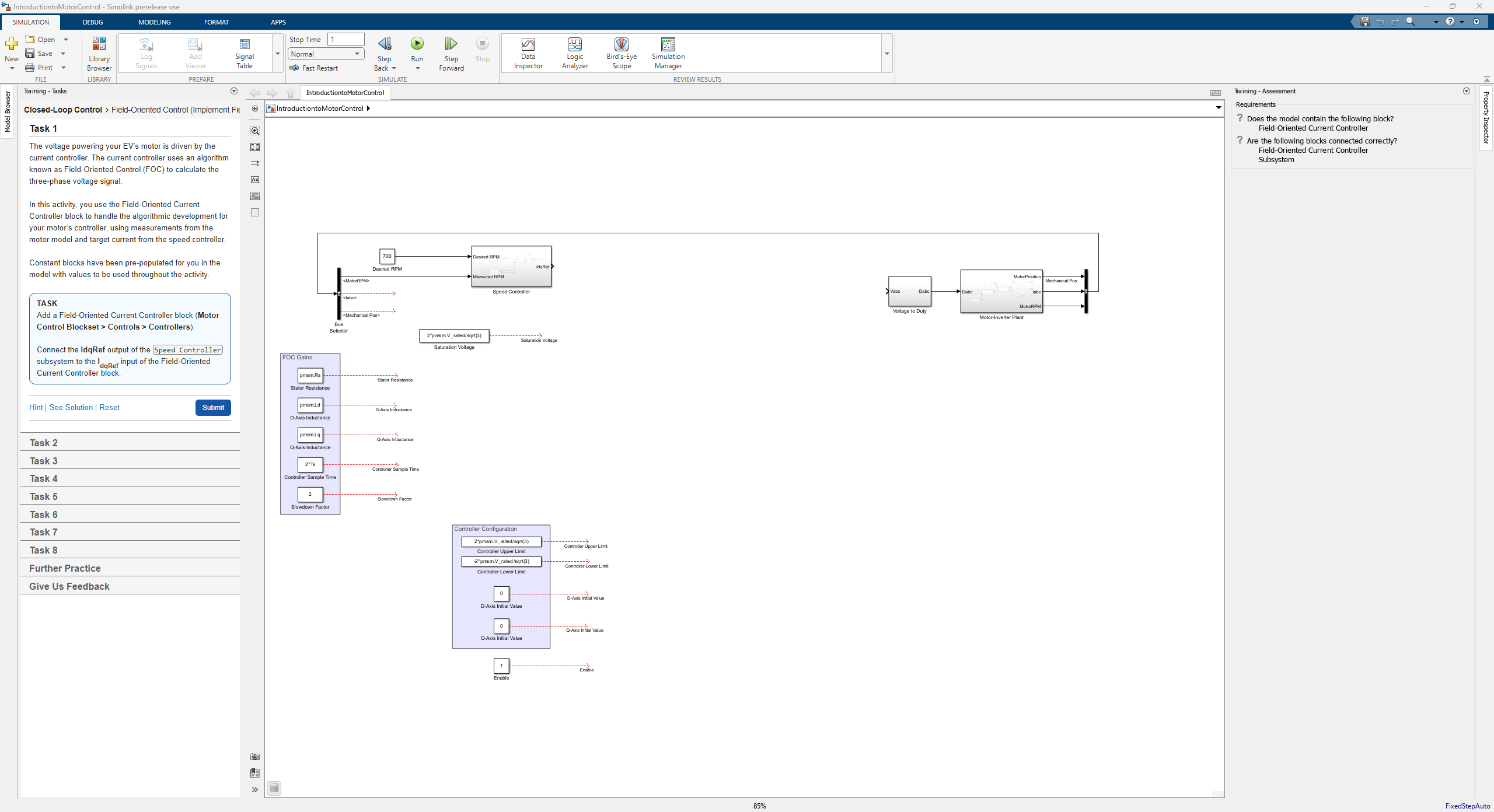
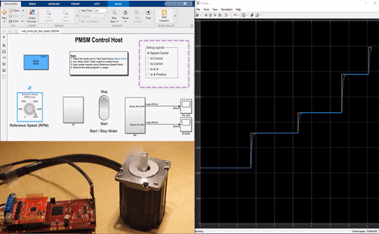
电机控制简介
自定进度的交互式课程,作为 Online Training Suite 订阅的一部分提供
视频
Motor Control Blockset 概述
了解 Motor Control Blockset 功能