butter
巴特沃斯滤波器设计
语法
说明
[___] = butter(___,"s") 使用上述语法中的任何输入或输出参量设计模拟巴特沃斯滤波器。
示例
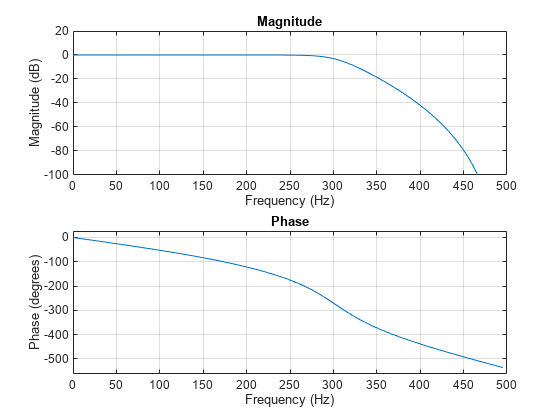
设计截止频率为 300 Hz 的 6 阶低通巴特沃斯滤波器,对于以 1000 Hz 的速率采样的数据,截止频率对应于 弧度/采样点。绘制其幅值和相位响应。用它对长度为 1000 个采样的随机信号进行滤波。
fc = 300; fs = 1000; [b,a] = butter(6,fc/(fs/2)); freqz(b,a,[],fs) subplot(2,1,1) ylim([-100 20])
dataIn = randn(1000,1); dataOut = filter(b,a,dataIn);
设计一个 6 阶带阻巴特沃斯滤波器,其归一化边缘频率为 和 弧度/采样点。绘制其幅值和相位响应。用它对随机数据进行滤波。
[b,a] = butter(3,[0.2 0.6],'stop');
freqz(b,a)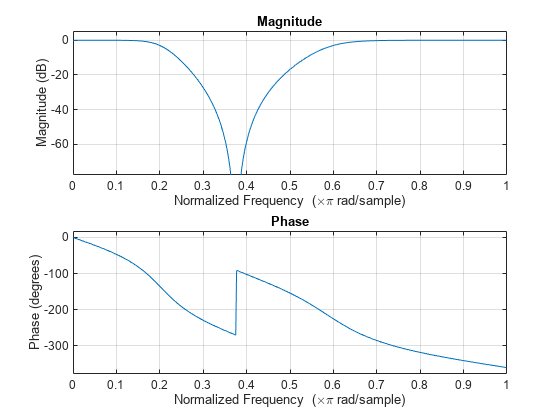
dataIn = randn(1000,1); dataOut = filter(b,a,dataIn);
设计一个 9 阶高通巴特沃斯滤波器。指定截止频率为 300 Hz,对于以 1000 Hz 的速率采样的数据,截止频率对应于 弧度/采样点。绘制幅值和相位响应。将零点、极点和增益转换为二阶节。显示滤波器的频率响应。
[z,p,k] = butter(9,300/500,"high");
sos = zp2sos(z,p,k);
freqz(sos)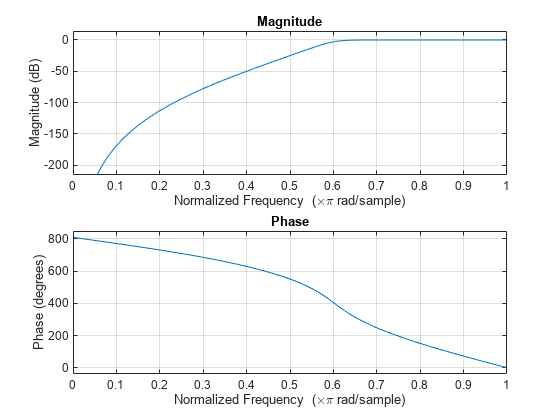
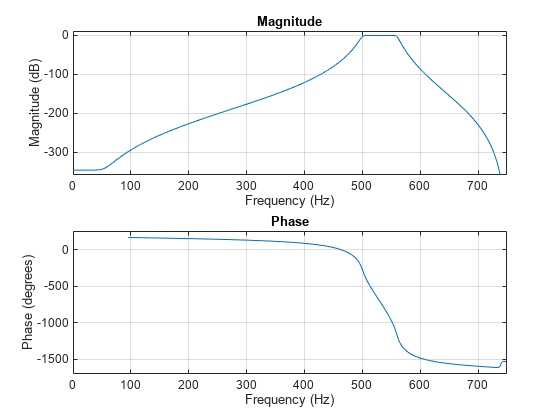
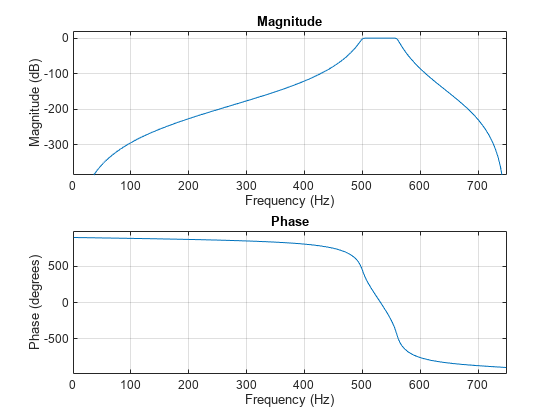
设计一个 20 阶带通巴特沃斯滤波器,其截止频率下限为 500 Hz,截止频率上限为 560 Hz。指定采样率为 1500 Hz。使用状态空间表示。将状态空间表示转换为二阶节。可视化频率响应。
fs = 1500; [A,B,C,D] = butter(10,[500 560]/(fs/2)); sos = ss2sos(A,B,C,D); freqz(sos,[],fs)
使用 designfilt 设计一个相同的滤波器。可视化频率响应。
d = designfilt("bandpassiir",FilterOrder=20, ... HalfPowerFrequency1=500,HalfPowerFrequency2=560, ... SampleRate=fs); freqz(d,[],fs)
设计截止频率为 2 GHz 的五阶模拟巴特沃斯低通滤波器。乘以 以将频率转换为弧度/秒。计算滤波器在 4096 个点上的频率响应。
n = 5;
wn = 2*pi*2e9;
w = 2*pi*1e9*logspace(-2,1,4096)';
[zb,pb,kb] = butter(n,wn,"s");
[bb,ab] = zp2tf(zb,pb,kb);
[hb,wb] = freqs(bb,ab,w);
gdb = -diff(unwrap(angle(hb)))./diff(wb);设计一个五阶切比雪夫 I 型滤波器,其通带边缘频率为 2 GHz,通带波纹为 3 dB。计算它的频率响应。
wp = wn;
[z1,p1,k1] = cheby1(n,3,wp,"s");
[b1,a1] = zp2tf(z1,p1,k1);
[h1,w1] = freqs(b1,a1,w);
gd1 = -diff(unwrap(angle(h1)))./diff(w1);设计一个五阶切比雪夫 II 型滤波器,其阻带边缘频率为 2.5 GHz,阻带衰减为 30 dB。计算它的频率响应。
ws = 2*pi*2.5e9;
[z2,p2,k2] = cheby2(n,30,ws,"s");
[b2,a2] = zp2tf(z2,p2,k2);
[h2,w2] = freqs(b2,a2,w);
gd2 = -diff(unwrap(angle(h2)))./diff(w2);设计一个具有相同的通带和阻带边缘频率和 3 dB 通带波纹、30 dB 阻带衰减的五阶椭圆滤波器。计算它的频率响应。
[ze,pe,ke] = ellip(n,3,30,wp,"s");
[be,ae] = zp2tf(ze,pe,ke);
[he,we] = freqs(be,ae,w);
gde = -diff(unwrap(angle(he)))./diff(we);设计一个具有相同边缘频率的 5 阶贝塞尔滤波器。计算它的频率响应。
[zf,pf,kf] = besself(n,wn); [bf,af] = zp2tf(zf,pf,kf); [hf,wf] = freqs(bf,af,w); gdf = -diff(unwrap(angle(hf)))./diff(wf);
对衰减绘图,以分贝为单位。以千兆赫为单位表示频率。比较滤波器。
fGHz = [wb w1 w2 we wf]/(2e9*pi); plot(fGHz,mag2db(abs([hb h1 h2 he hf]))) axis([0 5 -45 5]) grid on xlabel("Frequency (GHz)") ylabel("Attenuation (dB)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"], ... Location="southwest")
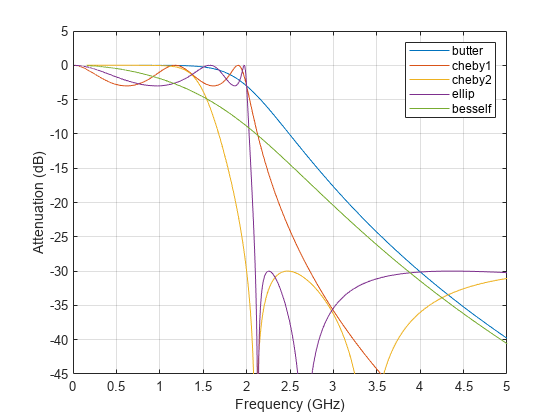
巴特沃斯和切比雪夫 II 型滤波器具有平坦的通带和宽过渡带。切比雪夫 I 型和椭圆滤波器滚降更快,但有通带波纹。切比雪夫 II 型设计函数的频率输入设置阻带的起点,而不是通带的终点。与巴特沃斯和切比雪夫滤波器相比,椭圆滤波器具有更陡峭的滚降特征,但其通带和阻带内均呈等波纹特征。在这四种经典滤波器类型中,椭圆滤波器通常能以最低的滤波器阶数满足一组给定的滤波器性能设定。
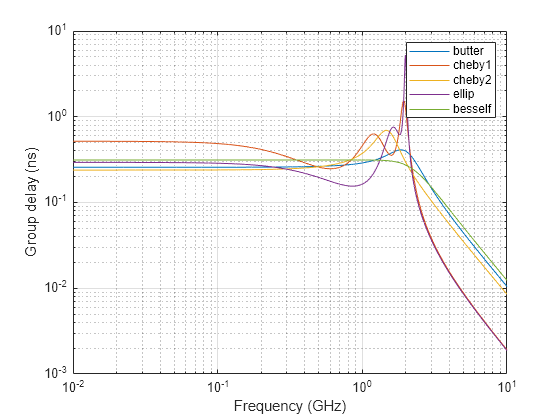
绘制采样中的群延迟。以千兆赫表示频率,以纳秒表示群延迟。比较滤波器。贝塞尔滤波器沿通带具有大致恒定的群延迟。
gdns = [gdb gd1 gd2 gde gdf]*1e9; gdns(gdns<0) = NaN; loglog(fGHz(2:end,:),gdns) grid on xlabel("Frequency (GHz)") ylabel("Group delay (ns)") legend(["butter" "cheby1" "cheby2" "ellip" "besself"], ... Location="southwest")
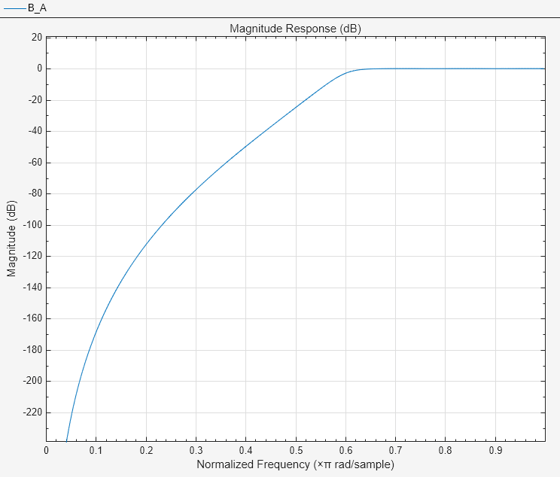
设计截止频率为 300 Hz、采样率为 1000 Hz 的九阶高通巴特沃斯滤波器。以级联二阶节形式返回滤波器系统的系数。
Wn = 300/(1000/2); [B,A] = butter(9,Wn,"high","ctf")
B = 5×3
0.2544 -0.2544 0
0.2544 -0.5088 0.2544
0.2544 -0.5088 0.2544
0.2544 -0.5088 0.2544
0.2544 -0.5088 0.2544
A = 5×3
1.0000 0.1584 0
1.0000 0.3264 0.0561
1.0000 0.3575 0.1570
1.0000 0.4189 0.3554
1.0000 0.5304 0.7165
绘制滤波器的幅值响应。
filterAnalyzer(B,A)
输入参数
输出参量
详细信息
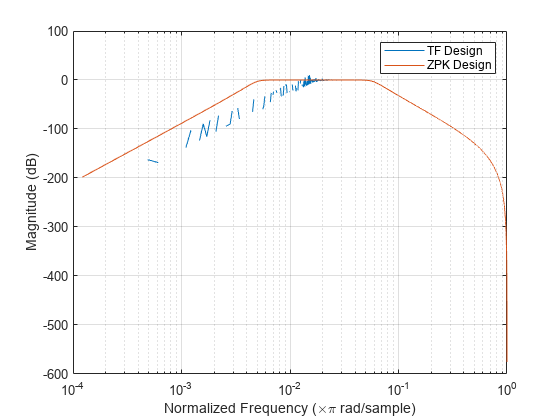
传递函数语法的数值不稳定性
一般情况下,使用级联传递函数("ctf" 语法)来设计 IIR 数字滤波器。如果使用传递函数(任何 [b,a] 语法)设计滤波器,可能会遇到数值不稳定的问题。这些不稳定性是舍入误差造成的,并且可能在阶数 n 小至 4 时出现。此示例说明了这一限制。
n = 6; Fs = 200e6; Wn = [0.5e6 6e6]/(Fs/2); ftype = "bandpass"; % Transfer Function (TF) design [b,a] = butter(n,Wn,ftype); % This is an unstable filter % CTF design [B,A] = butter(n,Wn,ftype,"ctf"); % Compare frequency responses [hTF,f] = freqz(b,a,8192,Fs); hCTF = freqz(B,A,8192,Fs); semilogx(f/1e6,db(hTF),".-",f/1e6,db(hCTF)) grid on legend(["TF Design" "CTF Design"]) xlabel("Frequency (MHz)") ylabel("Magnitude (dB)")
算法
巴特沃斯滤波器的幅值响应在通带内具有最大平坦度,并在整体上呈现单调性。这种平滑是以降低滚降陡度为代价的。对于给定滤波器阶数,椭圆和切比雪夫滤波器通常提供更陡的滚降。
butter 使用一个五步算法:
参考
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.