Registration and SLAM
Point cloud registration is the process of aligning two 3-D point clouds of the same scene into a common coordinate system. Lidar Toolbox™ functions enable you to register point clouds to one another using local and global methods, including iterative closest point (ICP), lidar odometry and mapping (LOAM), normal-distributions transform (NDT), fast global registration (FGR), and coherent point drift (CPD). You can also use the Lidar Registration Analyzer app to interactively register point clouds and compare the results of different registration methods, tune parameters, and add preprocessing steps. For more information, see Get Started with the Lidar Registration Analyzer App.
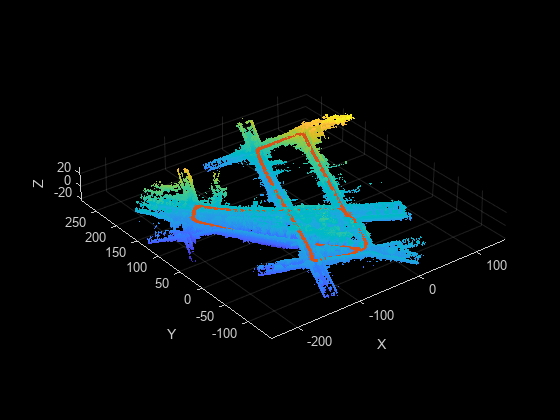
Simultaneous localization and mapping (SLAM) is the process of calculating the position and orientation of a vehicle or robot with respect to its surroundings while simultaneously building a map of that environment. The toolbox supports graph-based 3-D SLAM using point cloud data. For more information, see Implement Point Cloud SLAM in MATLAB.
You can also perform SLAM with 2-D lidar scans by using the
lidarscanmap object. For more information, see Build Map from 2-D Lidar Scans Using SLAM.
Apps
| Lidar Registration Analyzer | Analyze results of lidar point cloud registration (Since R2024a) |
Functions
Topics
- Implement Point Cloud SLAM in MATLAB
Understand point cloud registration and mapping workflow.
- Get Started with the Lidar Registration Analyzer App
Interactively compare results of point cloud registration techniques.
- Estimate Transformation Between Two Point Clouds Using Features
This example shows how to estimate a rigid transformation between two point clouds.
- Match and Visualize Corresponding Features in Point Clouds
This example shows how to match corresponding features between point clouds using the
pcmatchfeaturesfunction and visualize them using thepcshowMatchedFeaturesfunction.
Featured Examples
Register Point Clouds Using Global and Local Registration Techniques
Combine global and local registration techniques to align significantly misaligned point clouds.
Simulate Safe Landing of UAV in Unexplored Environment Using Unreal Engine
Simulate the safe landing operation of an Unmanned Aerial Vehicle (UAV) in an unexplored environment.
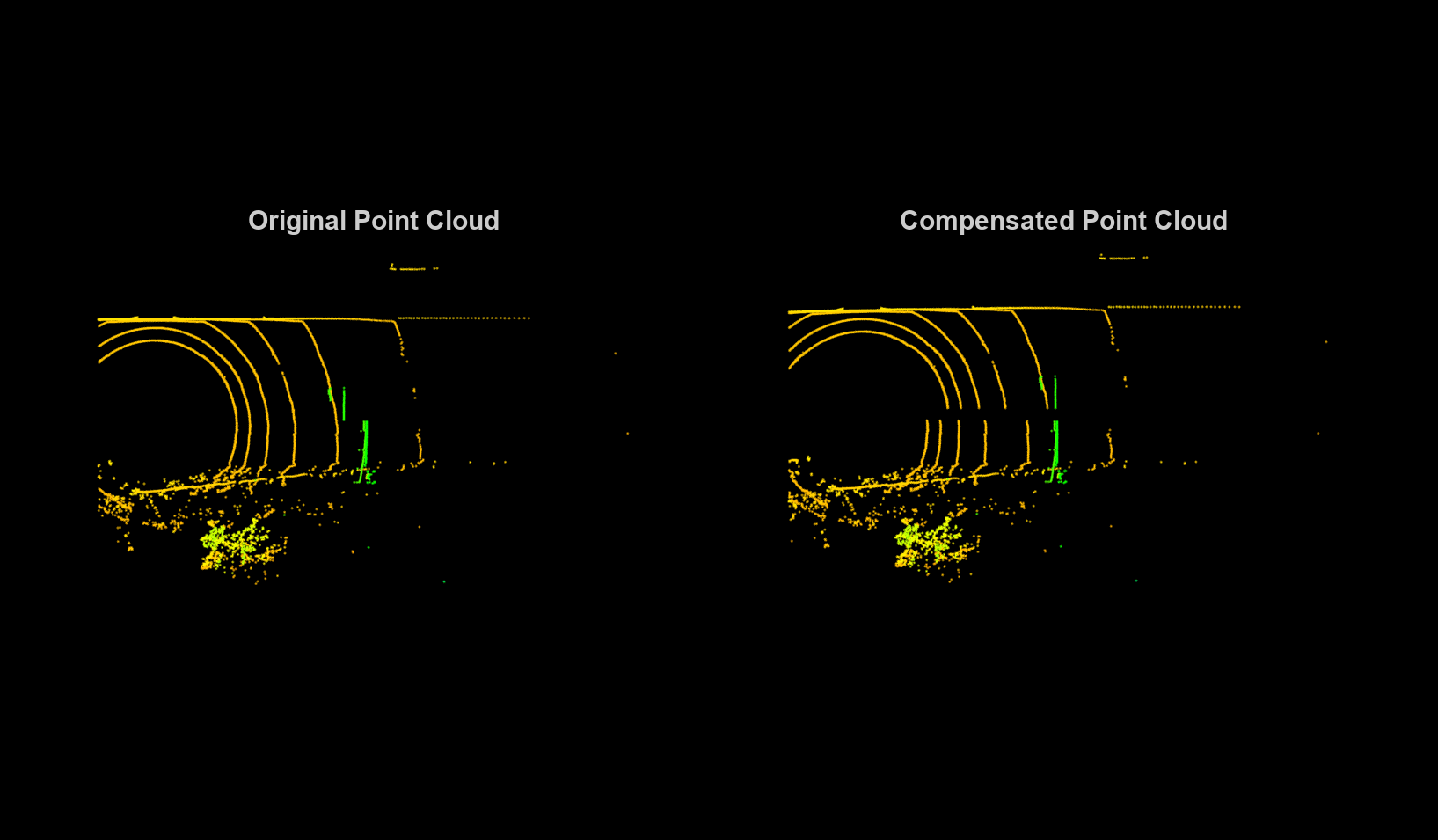
Motion Compensation in 3-D Lidar Point Clouds Using Sensor Fusion
Compensate point cloud distortion due to ego vehicle motion by fusing data from Global Positioning System (GPS) and inertial measurement unit (IMU) sensors. The goal of this example is to compensate the distortion in the point cloud data and recreate the surroundings accurately.
Build a Map with Lidar Odometry and Mapping (LOAM) Using Unreal Engine Simulation
Build a map with the lidar odometry and mapping (LOAM) [1] algorithm by using synthetic lidar data from the Unreal Engine® simulation environment. In this example, you learn how to:
Map Indoor Area Using Lidar SLAM and Factor Graph
Implement offline lidar SLAM on collected lidar scans to map an indoor area using a factor graph and lidar scan map.
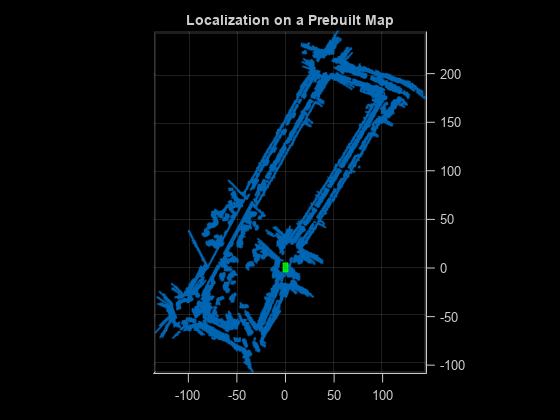
Build Map and Localize Using Segment Matching
Build a map with lidar data and localize the position of a vehicle on the map using SegMatch [1], a place recognition algorithm based on segment matching.
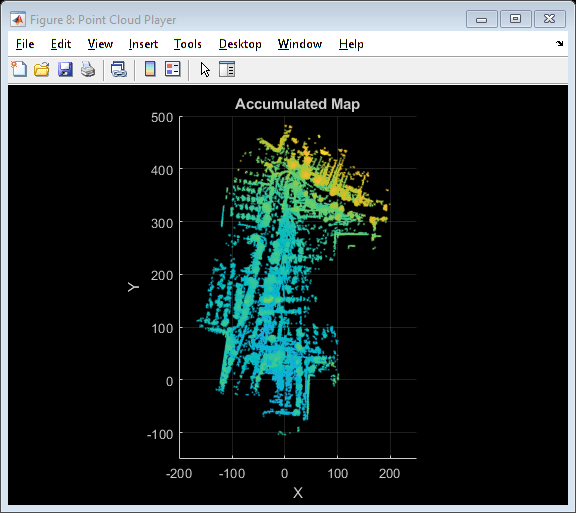
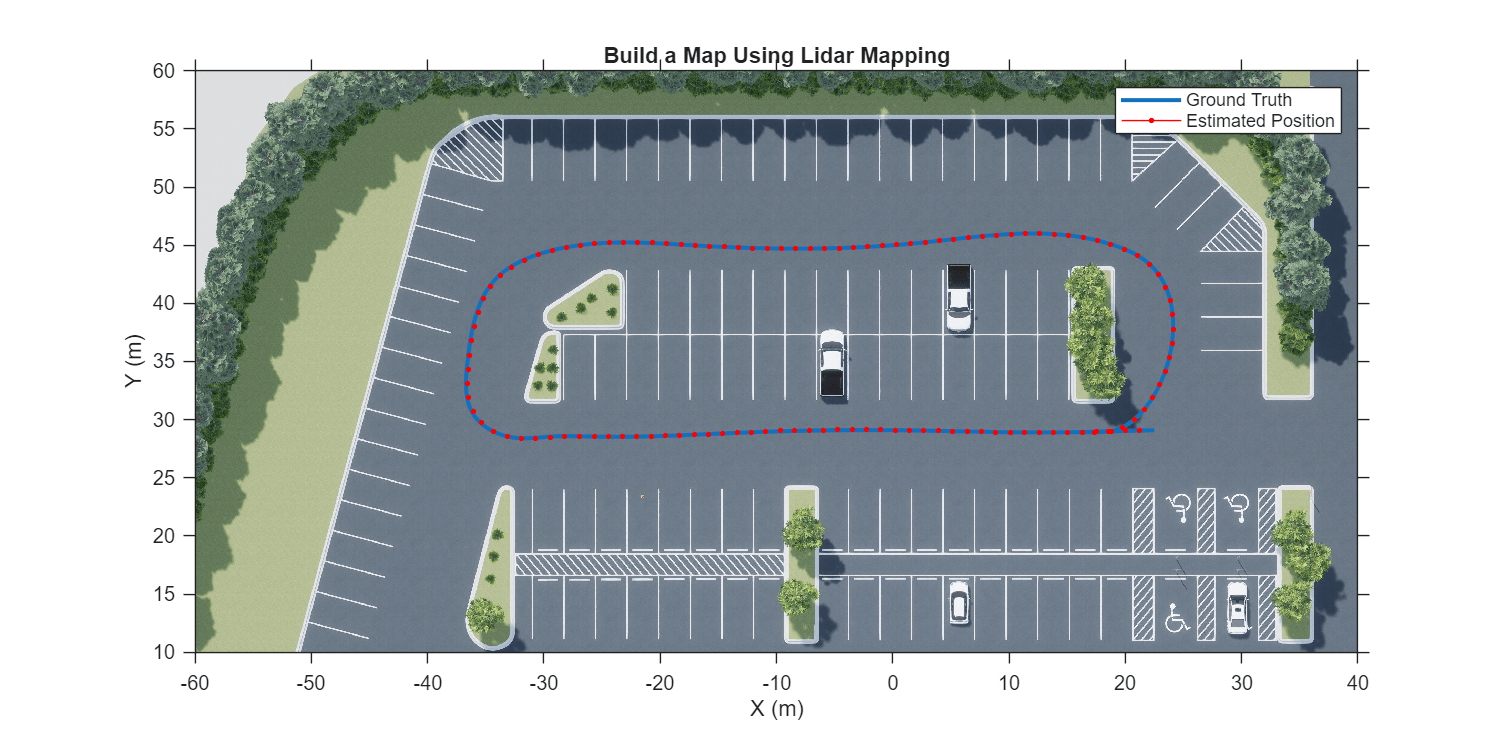
Feature-Based Map Building from Lidar Data
Demonstrates how to process 3-D lidar data from a sensor mounted on a vehicle to progressively build a map. Such a map is suitable for automated driving workflows such as localization and navigation. These maps can be used to localize a vehicle within a few centimeters.
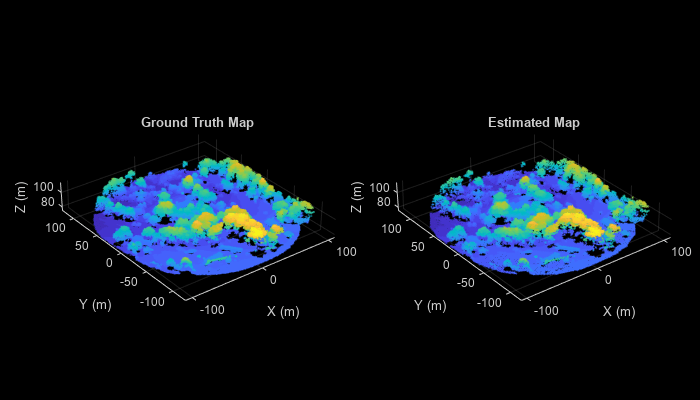
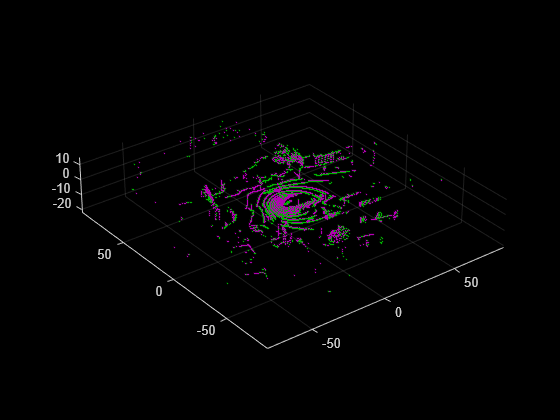
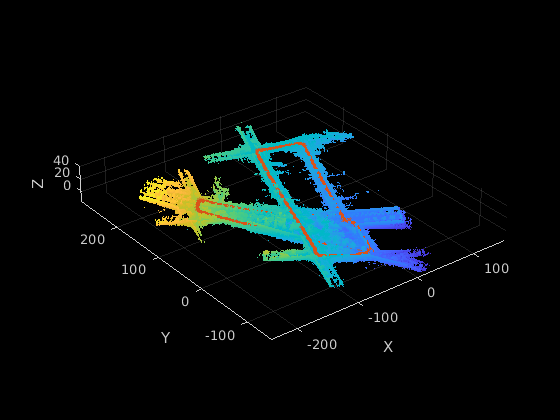
Aerial Lidar SLAM Using FPFH Descriptors
Demonstrates how to implement the simultaneous localization and mapping (SLAM) algorithm for aerial mapping using 3-D features. The goal of this example is to estimate the trajectory of a robot and create a point cloud map of its environment.
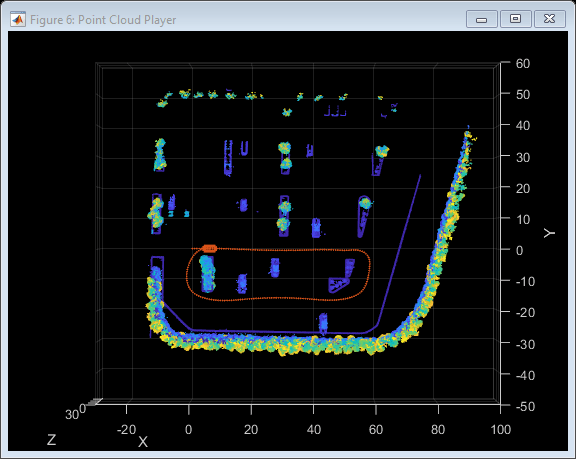
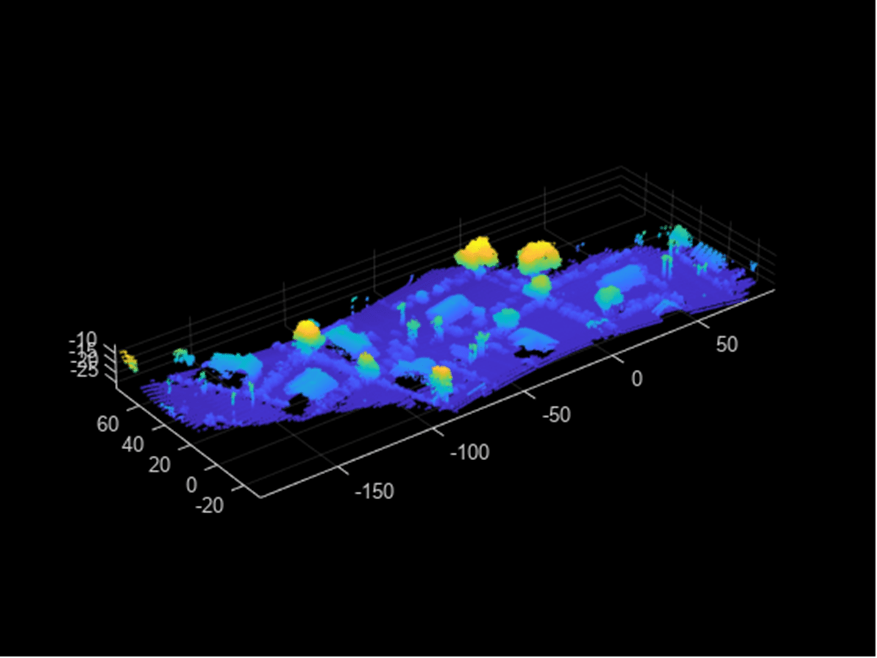
Build Occupancy Map from 3-D Lidar Data Using SLAM
Demonstrates how to build a 2-D occupancy map from 3-D Lidar data using a simultaneous localization and mapping (SLAM) algorithm. This occupancy map is useful for localization and path planning for vehicle navigation. You can also use this map as a prebuilt map to incorporate sensor information.
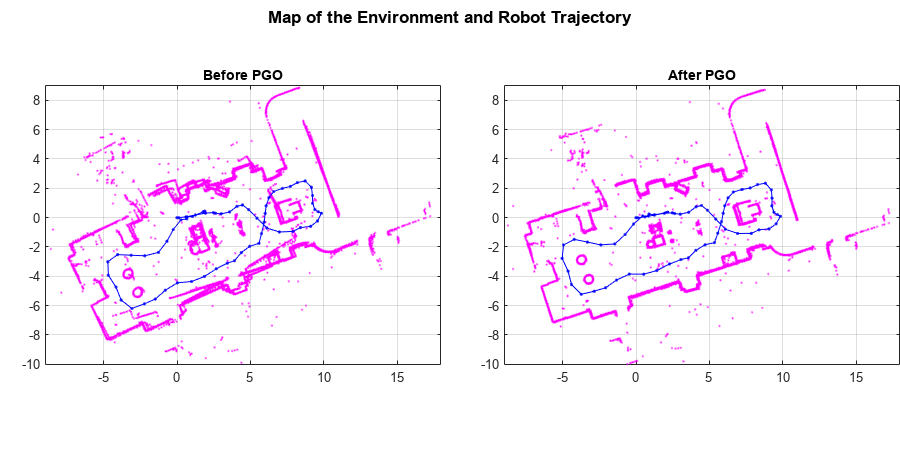
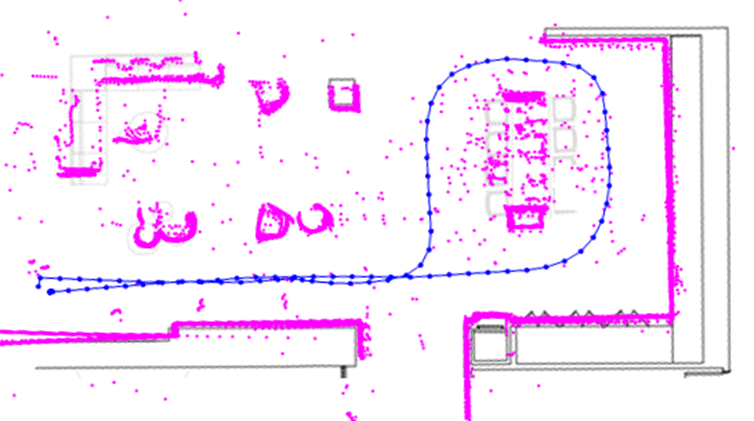
Build Map from 2-D Lidar Scans Using SLAM
Implement the SLAM algorithm on a series of 2-D lidar scans using scan processing and pose graph optimization (PGO). The goal of this example is to estimate the trajectory of the robot and build a map of the environment.
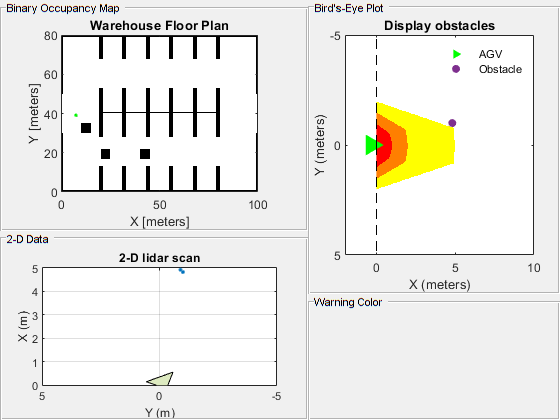
Collision Warning Using 2-D Lidar
Detect obstacles and warn of possible collisions using 2-D lidar data.
Build a Map from Lidar Data Using SLAM on GPU
Perform 3-D simultaneous localization and mapping (SLAM) using generated code on an NVIDIA® GPU.
Code Generation for Map Building from Lidar Data Using SLAM
Generate C++ code for building a map from lidar data using the simultaneous localization and mapping (SLAM) algorithm.