机器人与自主系统
机器人与自主系统介绍在物理环境中移动和操作以执行目标导向的动作的平台系统,如汽车、飞机、机器人和无人机。您可以通过多个工具箱中的工具和算法来仿真、估计、导航和控制平台状态(如它们的位置和速度)以及监控物理环境。具体来说,您可以:
使用各种坐标系和地图来设计、建模和仿真自主系统场景,包括平台、轨迹、路径、传感器和环境。
生成检测并进行分类,估计平台,并获得各种环境地图。
基于不同的运动特性,使用不同的路径规划算法来规划机器人、无人机和汽车的路径。
使用多种运动控制算法和策略控制机器人、无人机和汽车。
通过中间件(例如 ROS)连接到机器人和仿真器,并在硬件上部署您设计的估计、导航和控制算法。
适用产品: 机器人与自主系统
Automated Driving Toolbox
Design, simulate, and test ADAS and autonomous driving systems
Robotics System Toolbox
Design, simulate, test, and deploy robotics applications
UAV Toolbox
Design, simulate, and deploy UAV applications
ROS Toolbox
Design, simulate, and deploy ROS-based applications
Sensor Fusion and Tracking Toolbox
Design, simulate, and test multisensor tracking and positioning systems
RoadRunner
设计用于自动驾驶模拟的三维场景
RoadRunner Scenario
Create and play back scenarios for automated driving simulation
Simulink 3D Animation
Simulate and visualize dynamic systems in a 3D environment
主题
越野自动驾驶
- Simulate Earth Moving with Autonomous Excavator in Construction Site (Robotics System Toolbox)
Simulate ground excavation to create a depression and move spoil to dump truck and further relocate it to another site. (自 R2024b 起) - Generate Traversability Map for Offroad Terrain Using Semantic Segmentation (Robotics System Toolbox)
Create real-time traversability map for offroad terrain by fusing semantic segmentation from camera images with lidar point clouds. (自 R2026a 起)
场景设计和仿真
- 创建简单的 RoadRunner 场景 (RoadRunner)
使用 RoadRunner 场景编辑软件创建一个简单的道路网络。 - Create Driving Scenario Interactively and Generate Synthetic Sensor Data (Automated Driving Toolbox)
Use the Driving Scenario Designer app to create a driving scenario and generate sensor detections and point cloud data from the scenario. - Generate RoadRunner Scenario from Recorded Sensor Data (Automated Driving Toolbox)
Generate RoadRunner Scenario from recorded GPS data and preprocessed actor track list. - Aerodynamic Parameter Estimation Using Flight Log Data (UAV Toolbox)
Improve the accuracy of a UAV model by using flight log data to estimate the aerodynamic parameters of the UAV.
态势感知和状态估计
- Extended Object Tracking of Highway Vehicles with Radar and Camera (Sensor Fusion and Tracking Toolbox)
Track highway vehicles around an ego vehicle as extended objects that span multiple sensor resolution cells. - Visual-Inertial Odometry Using Synthetic Data (Sensor Fusion and Tracking Toolbox)
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera. - IMU and GPS Fusion for Inertial Navigation (Navigation Toolbox)
This example shows how you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicles (UAVs) or quadcopters.
运动规划
- Object Tracking and Motion Planning Using Frenet Reference Path (Sensor Fusion and Tracking Toolbox)
Dynamically plan the motion of an autonomous vehicle based on estimates of the surrounding environment. (自 R2021b 起) - Plan Path for Manipulator in Simulink with Robotics System Toolbox (Robotics System Toolbox)
Simulate manipulator path planning in Simulink® with code generation for autonomy functions from MATLAB®.
运动控制
- Highway Lane Following with RoadRunner Scenario (Automated Driving Toolbox)
Simulate highway lane following application, designed in Simulink, with RoadRunner Scenario. - Path Following with Obstacle Avoidance in Simulink (Navigation Toolbox)
Use Simulink® to avoid obstacles while following a path for a differential drive robot.
硬件部署
- Run ArduPilot Software-in-the-Loop Simulation with Quadcopter Plant in Simulink (UAV Toolbox)
Verify a quadcopter controller design by using Software-in-the-Loop (SITL) simulation and simulating the quadcopter plant model in Simulink. - PX4 Hardware-in-the-Loop (HITL) Simulation with Fixed-Wing Plant in Simulink (UAV Toolbox)
This example shows how to use the UAV Toolbox Support Package for PX4® Autopilots to verify the controller design by deploying the design on the PX4 Autopilot hardware board. - Estimating Orientation Using Inertial Sensor Fusion and MPU-9250 (Sensor Fusion and Tracking Toolbox)
Obtain data from an InvenSense MPU-9250 IMU sensor, and to use the 6-axis and 9-axis fusion algorithms in the sensor data to compute orientation of the device. - Sign Following Robot with ROS in MATLAB (ROS Toolbox)
Control a simulated robot running on a separate ROS-based simulator over a ROS network using MATLAB.
ROS 数据和网络分析
- Get Started with ROS 2 Network Analyzer App (ROS Toolbox)
Use ROS 2 Network Analyzer app to visualize and analyze nodes, topics, services, and actions interaction in ROS 2 network. (自 R2024b 起) - Visualize Messages from Live ROS or ROS 2 Topics (ROS Toolbox)
Visualize messages from live ROS or ROS 2 topics in ROS Data Analyzer app. - Publish Ground Truth and Sensor Data from RoadRunner Scenario to ROS 2 Network (ROS Toolbox)
Publish ground-truth and sensor data from a RoadRunner scenario to ROS 2 network and visualize it using ROS Data Analyzer app. (自 R2025a 起)
相关信息
精选示例

Offroad Navigation for Autonomous Haul Trucks in Open Pit Mine
Series shows how to create a set of planners to enable autonomous haul trucks to navigate uneven terrain and avoid obstacles.
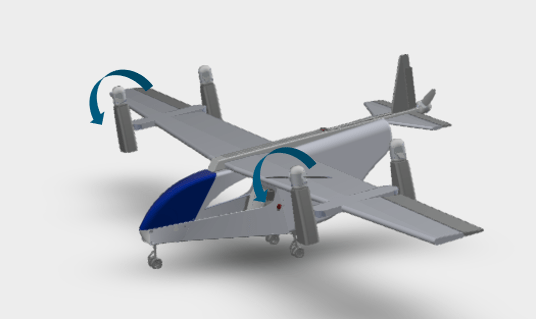
Design and Tune Controller for VTOL UAV
Design, tune, deploy, and visualize a tilt-rotor VTOL UAV in an advanced air mobility application.
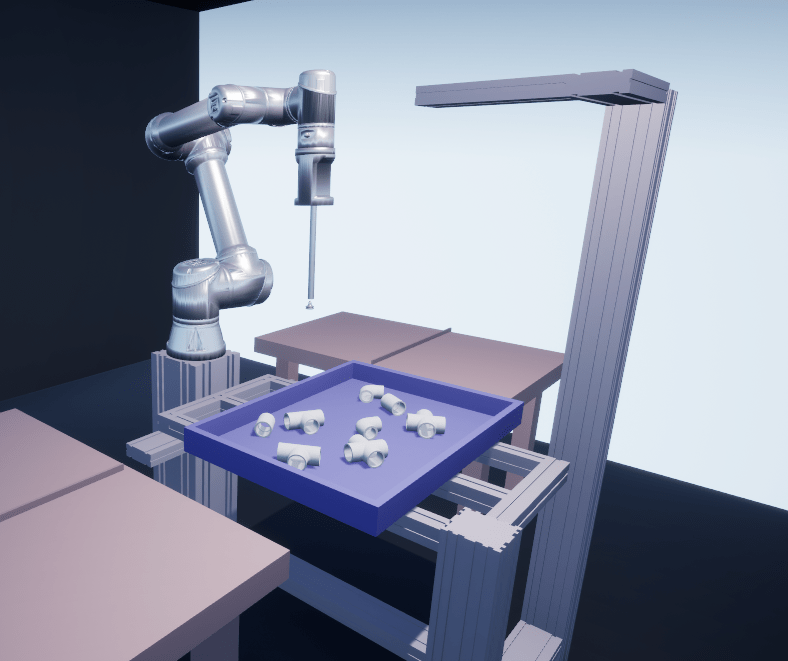
Intelligent Bin Picking System in Simulink
Design an intelligent bin picking system for a manipulator in an Unreal Engine simulation environment.

AEB Test Bench for Euro NCAP Scenarios
Configure AEB test bench designed in Simulink and simulate a scenario in RoadRunner Scenario per Euro NCAP® testing protocols.
Processor-in-the-Loop Verification of JPDA Tracker for Automotive Applications
Generate embedded code for a JPDA tracker and verify it using processor-in-the-loop (PIL) simulations.
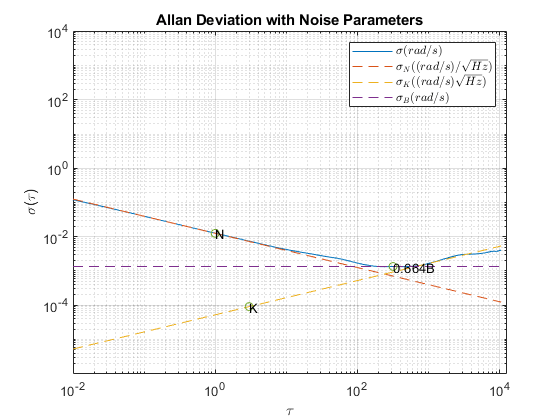
Inertial Sensor Noise Analysis Using Allan Variance
Use the Allan variance to determine noise parameters of a MEMS gyroscope. These parameters can be used to model the gyroscope in simulation. The gyroscope measurement is modeled as: