控制系统
作为控制系统工程师,您可以在开发的所有阶段使用 MATLAB® 和 Simulink®,包括被控对象建模、控制器设计、自动代码生成部署和系统验证。使用 MATLAB 和 Simulink 控制系统产品,您可以:
使用基本模型、系统辨识或自动参数估计对线性和非线性被控对象动态特性进行建模。
配平、线性化和计算非线性 Simulink 模型的频率响应。
使用根轨迹、波特图、LQR、LQG 和其他设计方法,基于被控对象模型设计控制器。
使用时域和频域中的超调、上升时间、相位裕度、增益裕度及其他性能和稳定性特性,以交互方式分析控制系统性能。
自动调节 PID、增益调度和任意 SISO 和 MIMO 控制系统。
设计和实现稳健的模型预测控制器或使用无模型控制方法,如模型引用自适应控制、极值搜索控制、强化学习和模糊逻辑。
将控制算法部署到嵌入式系统,用于实时控制、调节或参数估计。
设计和测试状态监控与预测性维护算法。
适用产品: 控制系统
Control System Toolbox
设计和分析控制系统
System Identification Toolbox
根据输入-输出数目据创建线性和非线性动态系统模型
Predictive Maintenance Toolbox
Design and test condition monitoring and predictive maintenance algorithms
Robust Control Toolbox
Design robust controllers for uncertain plants
Model Predictive Control Toolbox
Design and simulate model predictive controllers
Fuzzy Logic Toolbox
Design and simulate fuzzy logic systems
Simulink Control Design
线性化模型和设计控制系统
Simulink Design Optimization
Analyze model sensitivity and tune model parameters
Reinforcement Learning Toolbox
Design and train policies using reinforcement learning
Motor Control Blockset
设计和实现电机控制算法
C2000 Microcontroller Blockset
设计、仿真和实现适用于 Texas Instruments C2000 微控制器的应用程序
STM32 Microcontroller Blockset
Design, simulate, and implement applications for STMicroelectronics STM32 microcontrollers
Raspberry Pi Blockset
Design, simulate, and deploy applications for Raspberry Pi.
主题
被控对象建模、系统辨识和参数估计
- 使用模型对象进行控制系统建模 (Control System Toolbox)
使用模型对象构建表示您的控制系统的模型。 - 分析多变量系统中的数据并辨识模型 (System Identification Toolbox)
收集 MIMO 数据,估计和比较模型,并查看相应的模型响应。 - Online ARX Parameter Estimation for Tracking Time-Varying System Dynamics (System Identification Toolbox)
Perform online parameter estimation for a time-varying ARX model at the MATLAB command line. - Inverted Pendulum Parameter Estimation (Simulink Design Optimization)
Estimate multiple parameters of a model by iterated estimations.
配平、线性化和频率响应估计
- Compute Operating Points from Specifications Using Steady State Manager (Simulink Control Design)
Find steady-state operating points that meet specifications by trimming your Simulink model using the Steady State Manager app. - 在模型工作点处线性化 Simulink 模型 (Simulink Control Design)
在由初始状态值和输入信号组成的工作点处线性化模型。 - Frequency Response Estimation in Model Linearizer Using Pseudorandom Binary Sequence (Simulink Control Design)
Identify a frequency-domain model for a high-frequency power electronics system using a PRBS input signal in Model Linearizer.
控制设计和调节
- 根轨迹设计 (Control System Toolbox)
使用根轨迹图形调节方法为电液伺服机构设计补偿器。 - Design Compensator Using Automated Tuning Methods (Control System Toolbox)
Tune a compensator using automated tuning methods in Control System Designer. - Tune Control Systems Using systune (Control System Toolbox)
Usesystuneto tune structured controllers for a simple application. - Design Controller for Power Electronics Model Using Simulated I/O Data (Simulink Control Design)
Use PID Tuner to identify a plant model and design a PID controller for a power electronics model that cannot be linearized. - Tune Gain-Scheduled Controller Using Closed-Loop PID Autotuner Block (Simulink Control Design)
Use Closed-Loop PID Autotuner block to tune gain-scheduled PID controller for a water-tank model in one simulation.
预测与稳健控制
- Design MPC Controller in Simulink (Model Predictive Control Toolbox)
Design and simulate a model predictive controller for a Simulink model using MPC Designer. - Robust Control of Active Suspension (Robust Control Toolbox)
In this example, use H∞ synthesis to design a controller for a nominal plant model. Then, use μ synthesis to design a robust controller that accounts for uncertainty in the model.
自适应与智能控制
- Model Reference Adaptive Control of Aircraft Undergoing Wing Rock (Simulink Control Design)
Design an MRAC controller that adapts disturbance model parameters to achieve performance matching an ideal reference model. - Design and Train Agent Using Reinforcement Learning Designer (Reinforcement Learning Toolbox)
Design and train a DQN agent for a cart-pole system using the Reinforcement Learning Designer app. - Design Controller for Artificial Pancreas Using Fuzzy Logic (Fuzzy Logic Toolbox)
Design and tune a FIS tree to control insulin infusion for type-1 diabetes.
可部署算法
- Tune PI Controllers Using Field Oriented Control Autotuner Block on Real-Time Systems (Motor Control Blockset)
Compute the gain values of PI controllers within the speed and current controllers by using the Field Oriented Control Autotuner block. - Simulation and Code Generation Using Simulink Coder (Model Predictive Control Toolbox)
Simulate your MPC controller in Simulink and generate real-time code that uses either double-precision or single-precision signals. - Parameter Tuning for Digital Twins (Simulink Design Optimization)
Monitor the condition of an electric vehicle battery in the field with a deployed version of parameter estimation using Simulink Compiler™.
精选示例
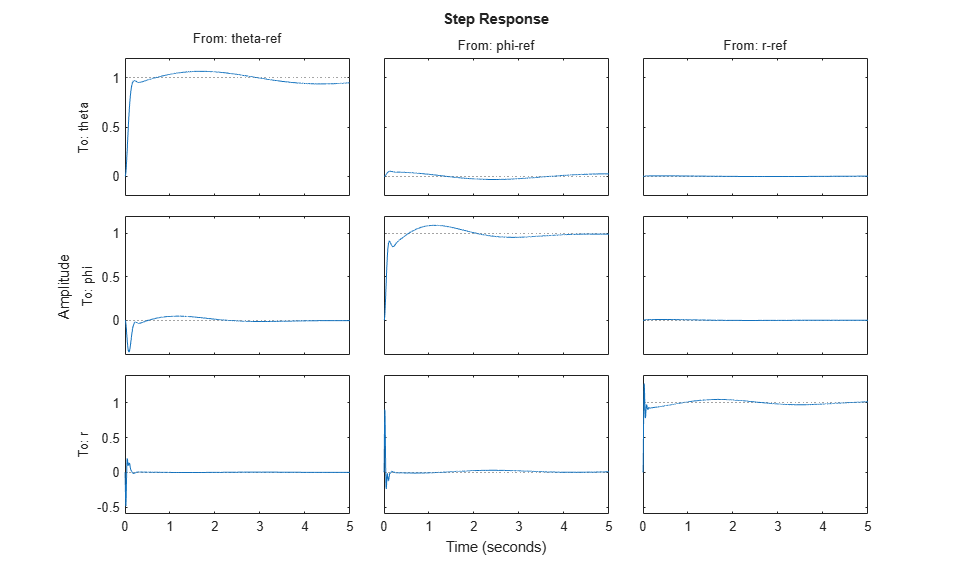
Multiloop Control of a Helicopter
Use slTuner and systune to tune a
multi-loop controller for a rotorcraft.

Design PID Controllers for Three-Phase Rectifier Using Closed-Loop PID Autotuner Block
Tune controllers for a Vienna-rectifier-based power factor corrector using the Closed-Loop PID Autotuner block.
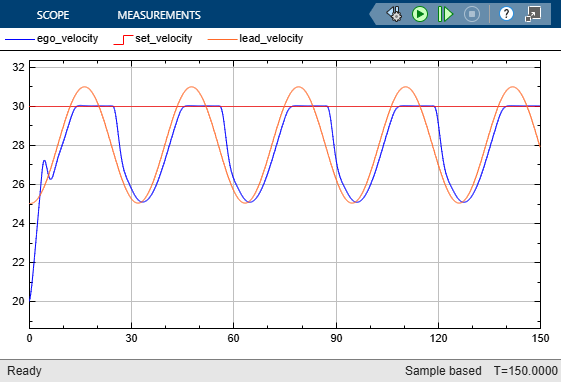
基于极值搜索控制的自适应巡航控制
设计极值搜索控制器,用于调整自适应巡航控制系统的控制器增益。

使用 C2000 处理器控制负载双电机的永磁同步电机(测功机)
本例采用磁场定向控制 (FOC) 来控制在测功机装置中耦合的两台三相永磁同步电机 (PMSM)。电机 1 以闭环速度控制模式运行。电机 2 以扭矩控制模式运行,并给电机 1 施加负载,因为它们是机械连接的。您可以利用这个示例来测试电机在不同负载条件下的性能。

Lane Following Using Nonlinear Model Predictive Control
Design a lane-following controller using nonlinear MPC with road curvature previewing.
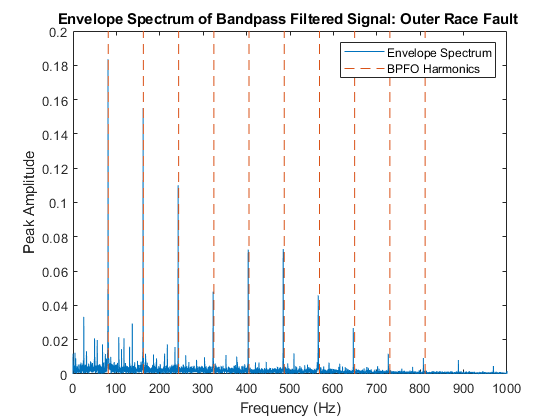
Rolling Element Bearing Fault Diagnosis
Perform fault diagnosis of a rolling element bearing based on acceleration signals.