特征检测和提取
局部特征及其描述符是许多计算机视觉算法的构建块。其应用包括图像配准、目标检测和分类、跟踪、运动估计和基于内容的图像检索 (CBIR)。这些算法使用局部特征来更好地处理缩放变化、旋转和遮挡。Computer Vision Toolbox™ 算法包括 FAST、哈里斯和 Shi & Tomasi 角点检测器,以及 SIFT、SURF、KAZE 和 MSER 斑点检测器。工具箱包括 SIFT、SURF、FREAK、BRISK、LBP、ORB 和 HOG 描述符。您可以根据应用的要求混合搭配检测器和描述符。
App
| 图像配准器 | 配准二维灰度图像 |
函数
主题
- Local Feature Detection and Extraction
Learn the benefits and applications of local feature detection and extraction.
- Point Feature Types
Choose functions that return and accept points objects for several types of features.
- 坐标系
指定像素索引、空间坐标和三维坐标系。
- Image Retrieval with Bag of Visual Words
Retrieve images from a collection of images similar to a query image using a content-based image retrieval (CBIR) system.
精选示例

Image Retrieval Using Customized Bag of Features
Create a Content Based Image Retrieval (CBIR) system using a customized bag-of-features workflow.
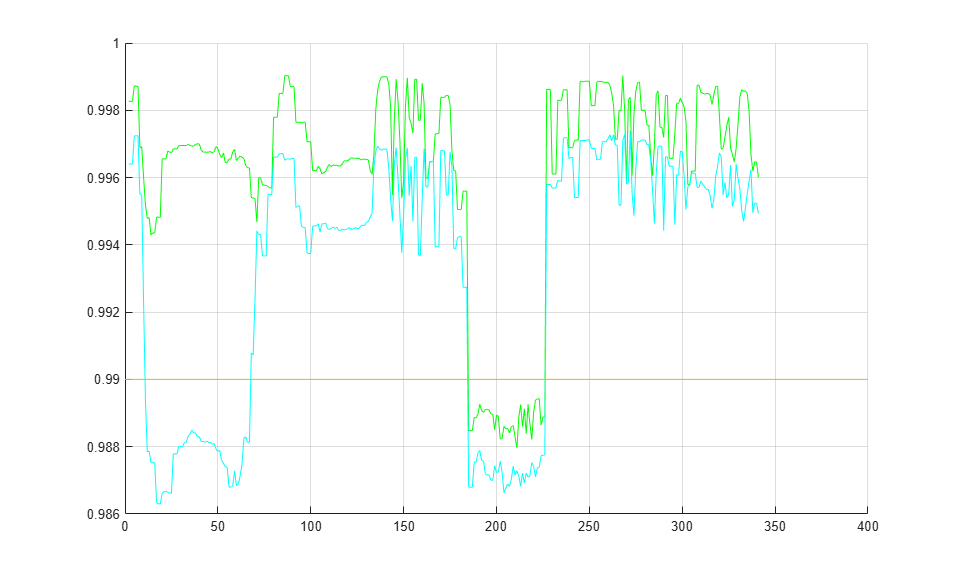
Pattern Matching
Use the 2-D normalized cross-correlation for pattern matching and target tracking. The example uses predefined or user specified target and number of similar targets to be tracked. The normalized cross correlation plot shows that when the value exceeds the set threshold, the target is identified.

Find Object in Cluttered Scene Using Image Point Features
Detect a particular object in a cluttered scene, given a reference image of the object.
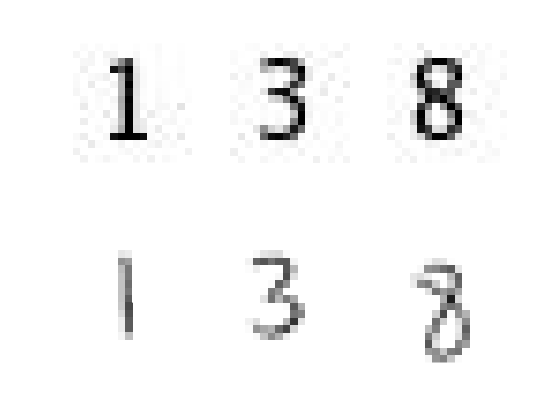
Digit Classification Using HOG Features
Classify digits using HOG features and a multiclass SVM classifier.

Automatically Find Image Rotation and Scale
Demonstrates how to automatically determine the geometric transformation between two images. Specifically, when one image is distorted in relation to another due to rotation and scaling, the functions detectSIFTFeatures and estgeotform2d can be employed to identify the rotation angle and scale factor. Subsequently, these parameters can be used to transform the distorted image back to its original appearance.
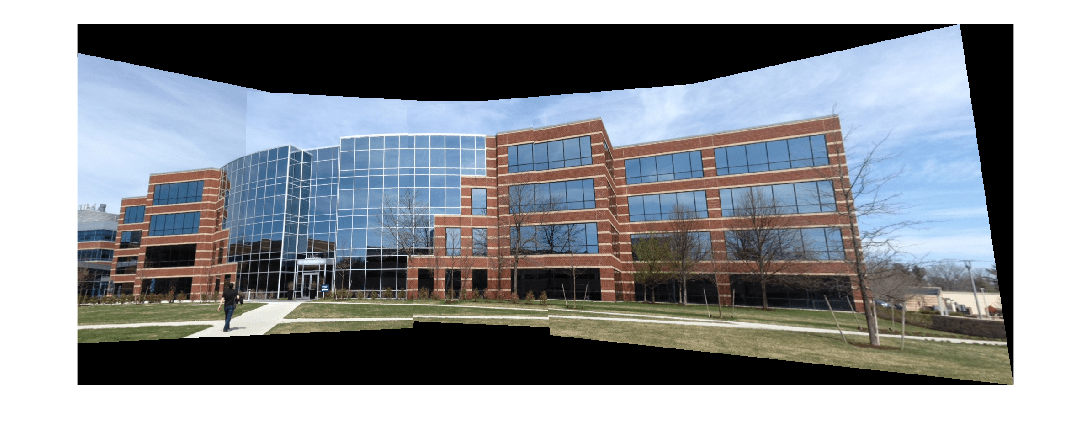
Create Panorama
Automatically stitch multiple images into panorama. The procedure for image stitching is an extension of feature based image registration. Instead of registering a single pair of images, multiple image pairs are successively registered relative to each other to form a panorama.
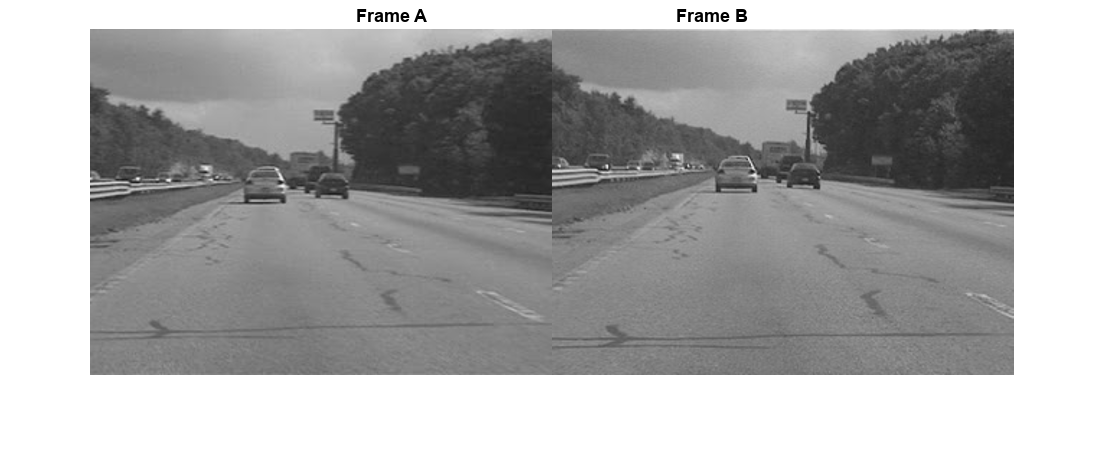
Stabilize Video Using Image Point Features
Stabilize a video that was captured from a jittery platform. One way to stabilize a video is to track a salient feature in the image and use this as an anchor point to cancel out all perturbations relative to it. This procedure, however, must be bootstrapped with knowledge of where such a salient feature lies in the first video frame. In this example, we explore a method of video stabilization that works without any such apriori knowledge. It instead automatically searches for the "background plane" in a video sequence, and uses the observed distortion to correct for camera motion.

Object Counting
Use morphological operations to count objects in a video stream.
Cell Counting
Use a combination of basic morphological operators and blob analysis to extract information from a video stream. In this case, the example counts the number of E. Coli bacteria in each video frame. Note that the cells are of varying brightness, which makes the task of segmentation more challenging.