自适应控制设计
如果控制系统包含随时间变化的不确定性,如未建模的系统动态特性和扰动,则自适应控制器可以通过实时调整其参数来补偿变化的过程信息。通过执行此操作,此类控制器可以实现期望的参考跟踪,即使被控对象动态中存在不确定性也是如此。
Simulink® Control Design™ 软件为以下实时自适应控制方法提供模块。
极值搜索控制 - 无模型自适应,用于最大化从控制系统派生的目标函数
模型参考自适应控制 - 自适应,用于跟踪已知参考模型的输出
迭代学习控制 - 基于模型的自适应和无模型自适应,以提高重复控制任务的性能。
滑模控制 - 在滑模面上保持系统状态,以便在存在不确定性和扰动的情况下提供高精确度和稳健的控制。
虚拟参考反馈调节 - 基于输入-输出数据自动调节线性参数化控制器
自适应陷波滤波器 - 自动根据检测到的谐振调整陷波滤波器的频率、深度和宽度。
模块
| Extremum Seeking Control | Compute controller parameters in real time by maximizing objective function |
| Model Reference Adaptive Control | Compute control actions to make controlled system track reference model (自 R2021b 起) |
| Iterative Learning Control | Design iterative learning controller for repetitive control tasks (自 R2024b 起) |
| Sliding Mode Controller (Reaching Law) | Design sliding mode controller based on reaching law (自 R2024b 起) |
| Linear Sliding Mode Controller (State Feedback) | Design sliding mode control with knowledge of linear systems using state feedback (自 R2025a 起) |
| Virtual Reference Feedback Tuning | Automatically tune linearly parameterized controllers based on input-output data (自 R2025a 起) |
| Adaptive Notch Filter | Automatically adjust notch filter parameters based on detected resonance (自 R2026a 起) |
函数
vrfttune | Tune controller parameters using virtual reference feedback tuning (VRFT) (自 R2026a 起) |
vrfttuneOptions | Create options for virtual reference feedback tuning (自 R2026a 起) |
主题
极值搜索控制
- 极值搜索控制
在存在未知系统动态特性的情况下,更新控制器参数以最大化目标函数。 - Extremum Seeking Control for Reference Model Tracking of Uncertain Systems
Track a reference plant model by adapting feedforward and feedback gains for an uncertain dynamic system. - Anti-Lock Braking Using Extremum Seeking Control
Design an extremum seeking controller that maximizes the friction coefficient of an ABS system to achieve the shortest stopping distance.
模型参考自适应控制
- 模型参考自适应控制
计算控制动作,使不确定的受控系统能够跟踪给定参考被控对象模型的行为。 - Model Reference Adaptive Control of Satellite Spin
Design an MRAC controller that adapts plant uncertainty model parameters to achieve performance that matches an ideal reference model. - 一阶系统的间接模型参考自适应控制
设计一个间接 MRAC 控制器,用于估计未知一阶系统的属性。 - 质量-弹簧-阻尼器系统的间接 MRAC 控制
设计一个间接 MRAC 控制器,用于估计未知 MIMO 系统的参数。
滑模控制
- 滑模控制
基于趋近律设计滑模控制。 (自 R2024b 起) - 质量-弹簧-阻尼器系统的滑模控制设计
滑模控制器定义了系统状态会收敛到并保持在其上的滑模面。 (自 R2024b 起) - 机械臂的滑模控制设计
为具有两个驱动关节的机械臂创建滑模控制器。 (自 R2024b 起) - Stabilize Chua System Using Sliding Mode Controller
Design sliding mode controller to stabilize a chaotic system. (自 R2025a 起) - DC 电机的滑模控制
设计用于 DC 电机参考跟踪的 SMC。 (自 R2025a 起)
迭代学习控制
- 迭代学习控制
为重复控制任务设计迭代学习控制。 (自 R2024b 起) - Iterative Learning Control of a Single-Input Single-Output System
Implement an ILC controller to improve closed-loop trajectory tracking performance. (自 R2024b 起) - Model Based Iterative Learning Control of Multi-Input Multi-Output System
Implement model-based ILC controller to improve closed-loop trajectory tracking performance of a MIMO system. (自 R2024b 起)
虚拟参考反馈调节
- Virtual Reference Feedback Tuning
Automatically tune linear controllers such as FIR, PID, or a combination of linearly parameterized controllers based on input-output data. - Tune PID Controller for Mass-Spring-Damper System Using Virtual Reference Feedback Tuning Block
Tune PID controller for mass-spring-damper using VRFT. (自 R2025a 起) - Tune FIR Filter Type Controller for Flexible Transmission System Using Virtual Reference Feedback Tuning Block
Tune FIR filter type controller using VRFT. (自 R2025a 起) - Tune PID Controller for Mass-Spring-Damper System Using VRFT at Command Line
Tune PID controller at command line using thevrfttunefunction. (自 R2026a 起)
自适应陷波滤波器
- Suppress PMSM Harmonics Using Adaptive Notch Filter
Reduce harmonic distortion in a PMSM using an extremum seeking control based adaptive notch filter. (自 R2025a 起) - Suppress Resonances Using Adaptive Notch Filter
Suppress resonances in a coupled inertia system using an adaptive notch filter implement using extremum seeking control and frequency response estimator. (自 R2025a 起)
精选示例
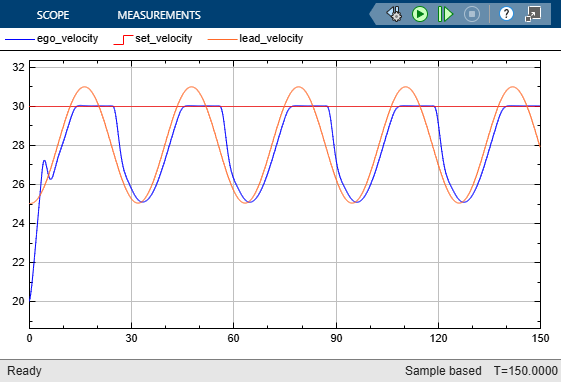
基于极值搜索控制的自适应巡航控制
设计极值搜索控制器,用于调整自适应巡航控制系统的控制器增益。
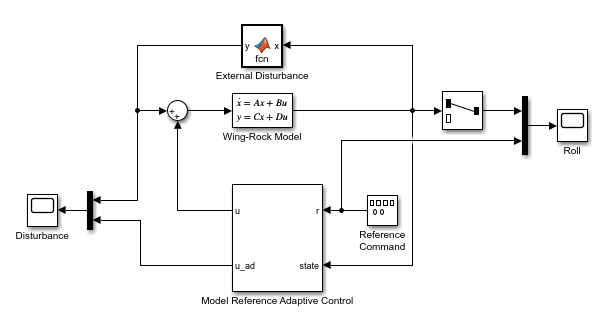
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Design an MRAC controller that adapts disturbance model parameters to achieve performance matching an ideal reference model.
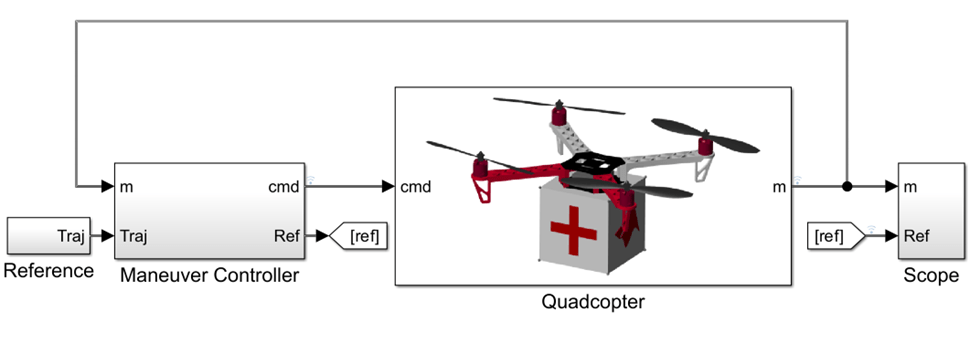
Quadrotor Control Using Model Reference Adaptive Control
Control a quadrotor vehicle performing way-point guidance using model reference adaptive control.
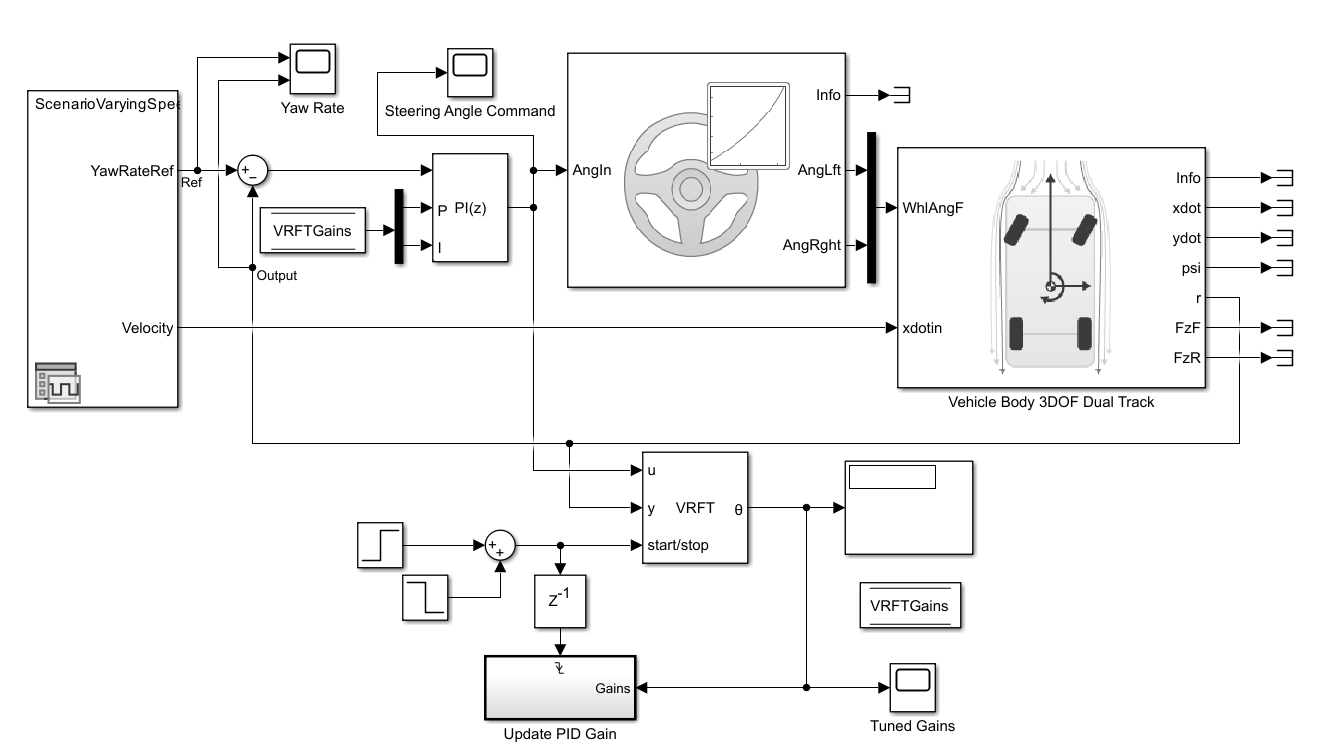
Tune PID Controller for Vehicle Lateral Control System Using Virtual Reference Feedback Tuning Block
Use the Virtual Reference Feedback Tuning block to tune PID controller for a vehicle lateral control system.

Solar PV System with Maximum Power Point Tracking Using Extremum Seeking Control
Implement the MPPT algorithm in a solar photovoltaic system using extremum seeking control.

Battery State of Charge Estimation using Extremum Seeking Control
Use ESC as a virtual sensor for battery cell state of charge estimation.
Quadrotor Trajectory Tracking Using Iterative Learning Control
Minimize trajectory tracking error for quadrotor under wind disturbances using iterative learning control.
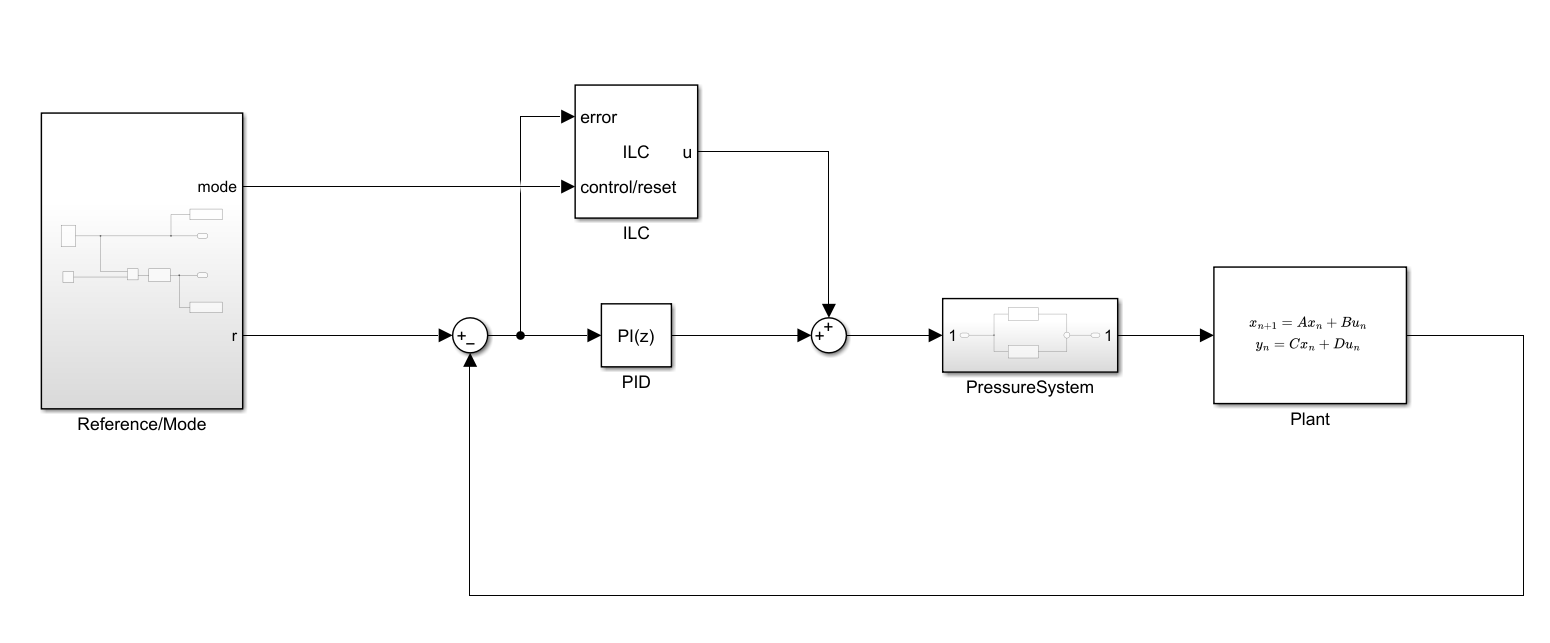
Soft Robot Control Using Iterative Learning Control
Demonstrates control of soft robot using the Iterative Learning Control (ILC) block in Simulink®. The soft-robot arm is commanded to track a step signal, while the actuators are pressure actuated using soft bellows. This example demonstrates, using ILC over repeated iterations, the controller learns to minimize error and get close tracking of given reference signal.