目标检测
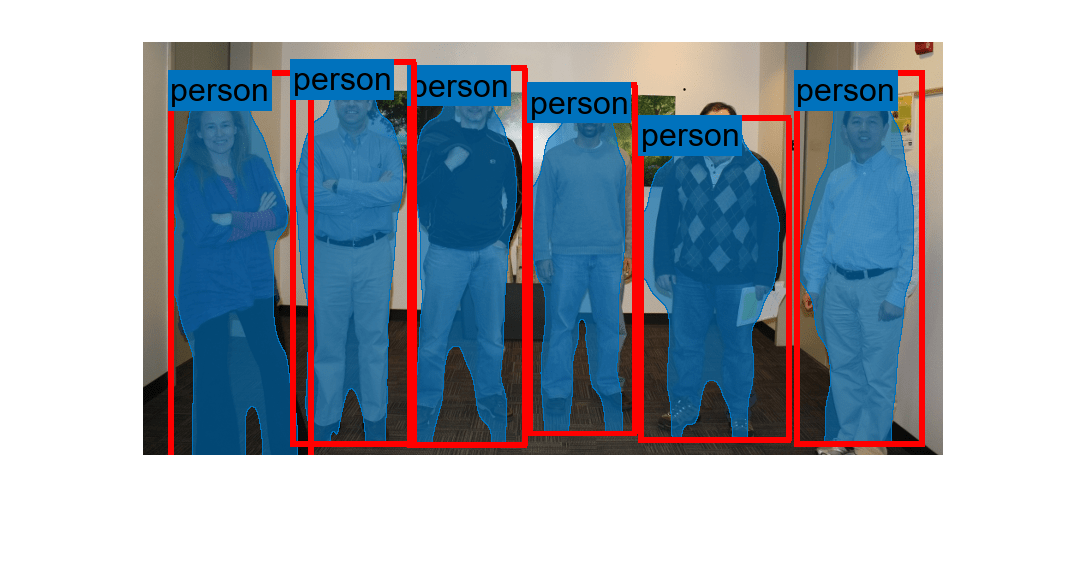
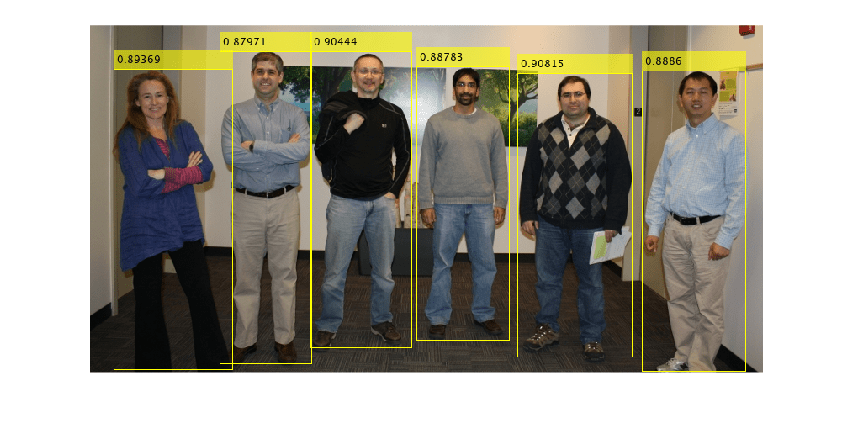
目标检测是一种计算机视觉方法,用于定位图像或视频中的目标实例。目标检测算法通常利用机器学习或深度学习来生成有意义的结果。当查看图像或观看视频时,人类可以在瞬间识别并定位感兴趣的目标。目标检测旨在使用计算机复现这种智能。目标检测的最佳方法取决于您的应用和所要尝试解决的问题。
深度学习方法需要大量经过标注的训练图像,因此,推荐使用 GPU 来减少训练模型所需的时间。基于深度学习的目标检测方法使用卷积神经网络(即 CNN 或 ConvNet),比如 YOLO,或使用单次检测 (SSD) 方法。您可以训练自定义目标检测器,或通过迁移学习方法来使用预训练的目标检测器,这种方法使您能够从预训练网络开始,然后针对您的应用进行微调。卷积神经网络需要 Deep Learning Toolbox™。具有 CUDA® 功能的 GPU 支持训练和预测。推荐使用 GPU,并且需要有 Parallel Computing Toolbox™。有关详细信息,请参阅Computer Vision Toolbox 预设项和MathWorks 产品中的并行计算支持 (Parallel Computing Toolbox)。
用于目标检测的机器学习方法包括聚合通道特征 (ACF)、使用有向梯度直方图 (HOG) 特征的支持向量机 (SVM) 分类以及用于人脸或上身检测的 Viola-Jones 算法。您可以选择从预训练的目标检测器开始,也可以根据您的应用创建自定义的目标检测器。

函数
模块
| Deep Learning Object Detector | 使用经过训练的深度学习目标检测器检测目标 (自 R2021b 起) |
主题
快速入门
- Get Started with Object Detection Using Deep Learning
Perform object detection using deep learning neural networks such as YOLOX, YOLO v4, RTMDet, and SSD. - Choose an Object Detector
Compare object detection deep learning models, such as YOLOX, YOLO v4, RTMDet, and SSD. - Local Feature Detection and Extraction
Learn the benefits and applications of local feature detection and extraction. - Get Started with Cascade Object Detector
Train a custom classifier. - Point Feature Types
Choose functions that return and accept points objects for several types of features. - Getting Started with OCR
Detect and recognize text in multiple languages, train OCR models to recognize custom text. - Image Classification with Bag of Visual Words
Use the Computer Vision Toolbox™ functions for image category classification by creating a bag of visual words.
用于目标检测和实例分割的训练数据
- Get Started with the Image Labeler
Interactively label rectangular ROIs for object detection, pixels for semantic segmentation, polygons for instance segmentation, and scenes for image classification. - Get Started with the Video Labeler
Interactively label rectangular ROIs for object detection, pixels for semantic segmentation, polygons for instance segmentation, and scenes for image classification in a video or image sequence. - Datastores for Deep Learning (Deep Learning Toolbox)
Learn how to use datastores in deep learning applications. - Training Data for Object Detection and Semantic Segmentation
Create training data for object detection or semantic segmentation using the Image Labeler or Video Labeler. - Get Started with Image Preprocessing and Augmentation for Deep Learning
Preprocess data for deep learning applications with deterministic operations such as resizing, or augment training data with randomized operations such as random cropping.
深度学习快速入门
- 在 MATLAB 中进行深度学习 (Deep Learning Toolbox)
通过使用卷积神经网络进行分类和回归来探索 MATLAB® 的深度学习能力,包括预训练网络和迁移学习,以及在 GPU、CPU、集群和云上进行训练。 - 预训练的深度神经网络 (Deep Learning Toolbox)
了解如何下载和使用预训练的卷积神经网络进行分类、迁移学习和特征提取。
精选示例
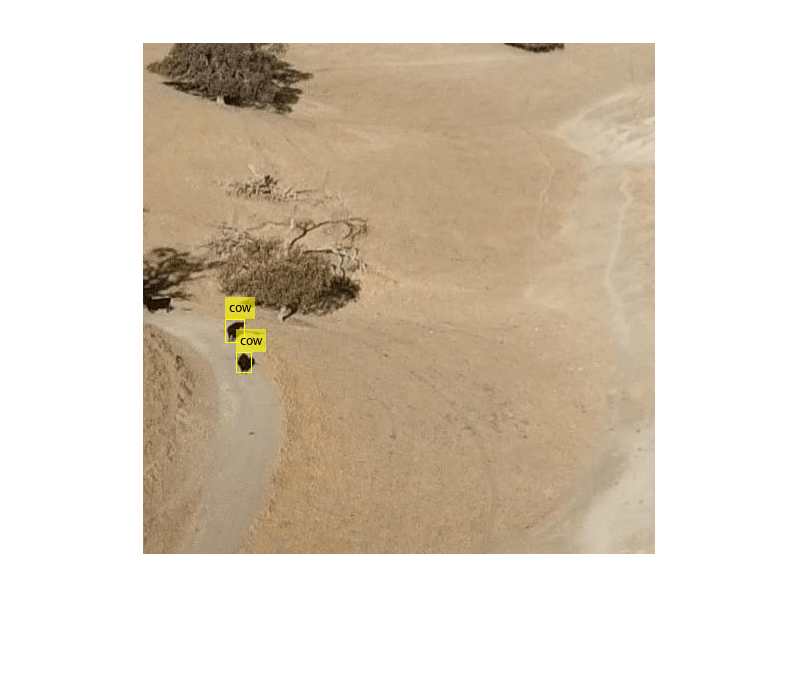
Detect Small Objects Using Tiled Training of YOLOX Network
Detect small objects in full-resolution images using tiled training of a you only look once version X (YOLOX) deep learning network.
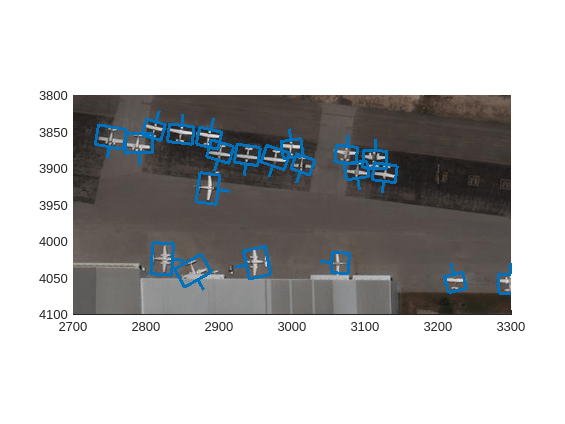
Object Detection in Large Satellite Imagery Using Deep Learning
Perform object detection on large satellite imagery using deep learning.
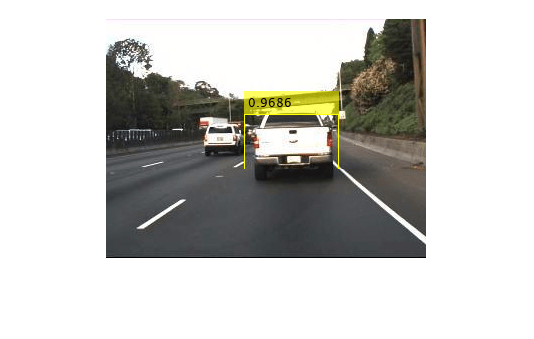
Object Detection Using YOLO v4 Deep Learning
Detect objects in images using you only look once version 4 (YOLO v4) deep learning network. In this example, you will

Multiclass Object Detection Using YOLO v2 Deep Learning
Train a YOLO v2 multiclass object detector and evaluate object detector performance across selected classes and overlap thresholds.
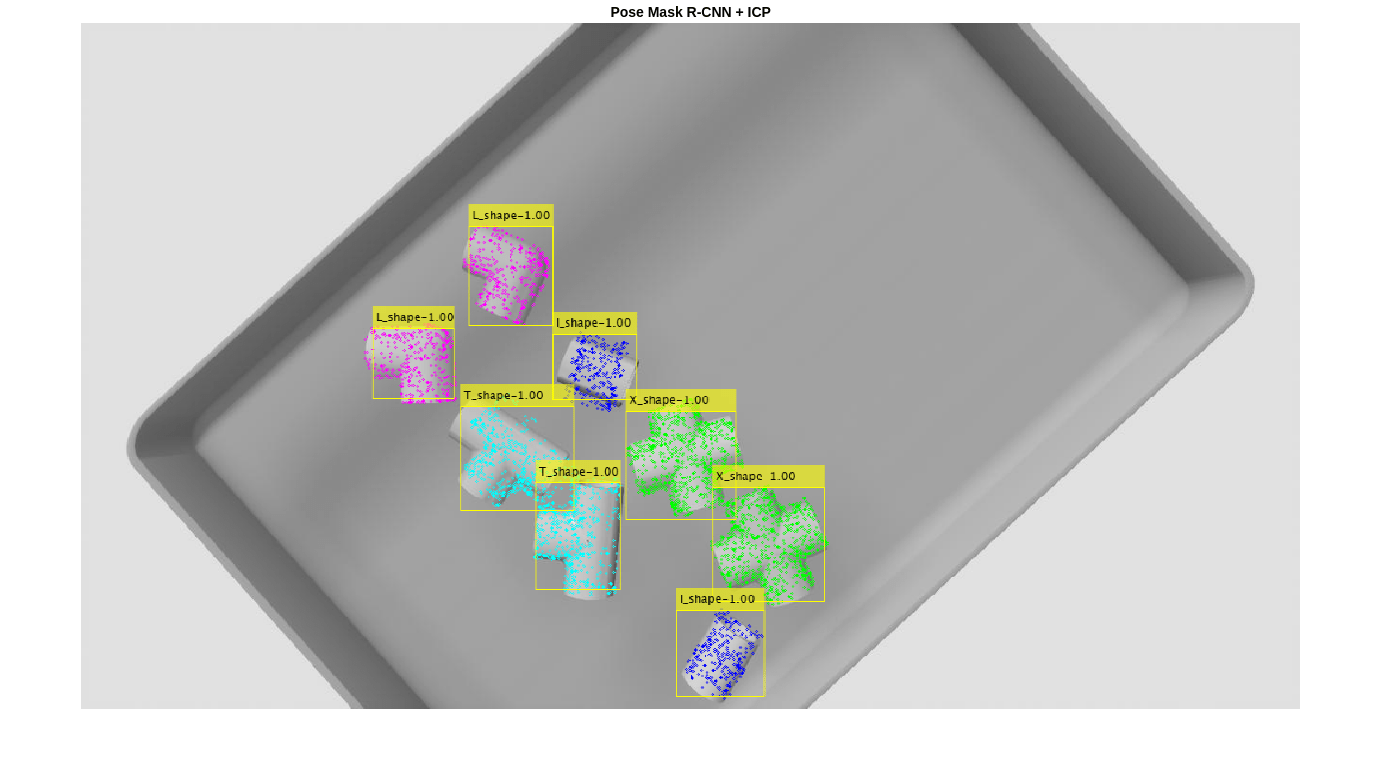
Perform 6-DoF Pose Estimation for Bin Picking Using Deep Learning
Perform six degrees-of-freedom (6-DoF) pose estimation by estimating the 3-D position and orientation of machine parts in a bin using RGB-D images and a deep learning network.

Train Object Detectors in Experiment Manager
Use the Experiment Manager app to find optimal training options for object detectors.

Find Object in Cluttered Scene Using Image Point Features
Detect a particular object in a cluttered scene, given a reference image of the object.

Read Barcodes in Image
Detect, decode, and localize 1-D and 2-D barcodes in an image.

Detect Cars Using Gaussian Mixture Models
Detect and count cars in a video sequence using foreground detector based on Gaussian mixture models (GMMs).
Perform Instance Segmentation Using Mask R-CNN
Segment individual instances of people and cars using a multiclass mask region-based convolutional neural network (R-CNN).

Import Pretrained ONNX YOLO v2 Object Detector
Import pretrained YOLO v2 object detector from ONNX deep learning framework.
Export YOLO v2 Object Detector to ONNX
Export pretrained YOLO v2 object detector to ONNX deep learning framework.

Generate Code for Detecting Objects in Images by Using ACF Object Detector
Generate code from a MATLAB® function that detects objects in images by using an acfObjectDetector object. When you intend to generate code from your MATLAB function that uses an acfObjectDetector object, you must create the object outside of the MATLAB function. The example explains how to modify the MATLAB code in Train Stop Sign Detector Using ACF Object Detector to support code generation.

Code Generation for Object Detection by Using YOLO v2
Generate CUDA® code for object detection using YOLO v2.

Code Generation for Object Detection by Using Single Shot Multibox Detector
Generate CUDA code for an SSD network.
Code Generation for People Detection Using Deep Learning
Generate CUDA code for people detection