矢量控制
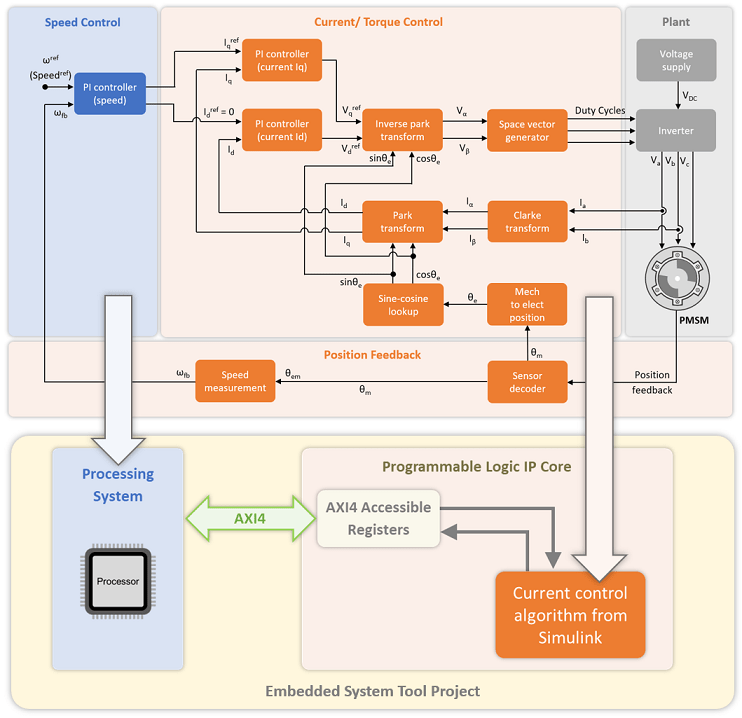
磁场定向控制 (FOC) 可帮助您在永磁同步电机 (PMSM) 和感应电机中实现高性能动力学特性。FOC 的基本原理是将定子电流矢量解耦为两个正交分量:一个用于磁通,另一个用于转矩生成。这种解耦通过称为克拉克和帕克变换的数学抽象来帮助实现。首先,克拉克变换将三相静止电流信号转换为两相静止 alpha-beta 坐标系。随后,帕克变换将这些静止矢量旋转至与转子的磁场对齐旋转的同步 d-q 坐标系中。通过将复杂的 AC 波形转换为类 DC 量,FOC 允许对转矩和磁通进行独立、精确的控制。
您使用 Motor Control Blockset 创建的 Simulink 模型可用于集成功率逆变器、电机的数学表示以及由嵌套的比例积分 (PI) 控制环组成的 FOC 算法。您可以通过调整电机模块参数以及每种电机类型所需的特定磁通估计逻辑,为 PMSM 和感应电机仿真 FOC。
Motor Control Blockset 还支持直接转矩控制 (DTC),它是一种矢量电机控制方法,通过直接控制电机的磁通和转矩来实现电机转速控制。与控制 d 和 q 轴电机电流的磁场定向控制 (FOC) 不同,DTC 算法根据电机位置和电流估计转矩和磁通值。然后,它使用 PI 控制器来控制电机转矩和磁通,最终生成运行电机的最佳电压。
注意
此处列出的模块符合 MISRA C™ 规范。
函数
mcb.PMSMCharacteristics | Compute and plot PMSM drive characteristics and constraint curves (自 R2022b 起) |
mcb.ACIMCharacteristics | Compute and plot ACIM characteristic curves (自 R2022a 起) |
mcb.getPIControllerParameters | Compute gains for PI controller in field-oriented control |
mcb.calcFOCGains | Compute gains and transfer functions for PI controller in field-oriented control of PMSM (自 R2025a 起) |
mcb.getMotorControlAnalysis | Frequency-domain analysis plots for PI controller of field-oriented control |
模块
主题
- 磁场定向控制
使用磁场定向控制实现 PMSM 和感应电机的转速控制。
- 设计磁场定向控制算法
设计并集成转矩控制和转速控制子系统。
- Field-Weakening Control
Implement control for speeds above base speed for PMSM and induction motor by using field-weakening control.
- 使用 PIL 测试进行代码验证和探查
此示例说明如何在 Texas Instruments® LAUNCHXL-F28379 硬件板上进行 PIL 探查。在处理器在环 (PIL) 仿真中,控制算法在目标硬件中执行,但被控对象模型在主机上运行。被控对象模型对控制器的输入和输出信号进行仿真,并使用串行通信接口与控制器通信。借助此功能,您可以使用 PIL 仿真来确定目标硬件上的执行时间,然后可以将其与主机上仿真模型的执行时间相比较。
- How to Use Single Shunt FOC Library Blocks
This example shows how to use the Simulink blocks for single shunt FOC available with Motor Control Blockset™.
- 直接转矩控制 (DTC)
通过控制电机磁通和转矩来实现 PMSM 的转速控制。
精选示例

使用 SI 单位的 PMSM 磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。然而,此示例中的 FOC 算法使用信号的 SI 单位来执行计算,而不使用数量的标幺表示(有关标幺制的详细信息,请参阅标幺制)。以下是信号及其 SI 单位:
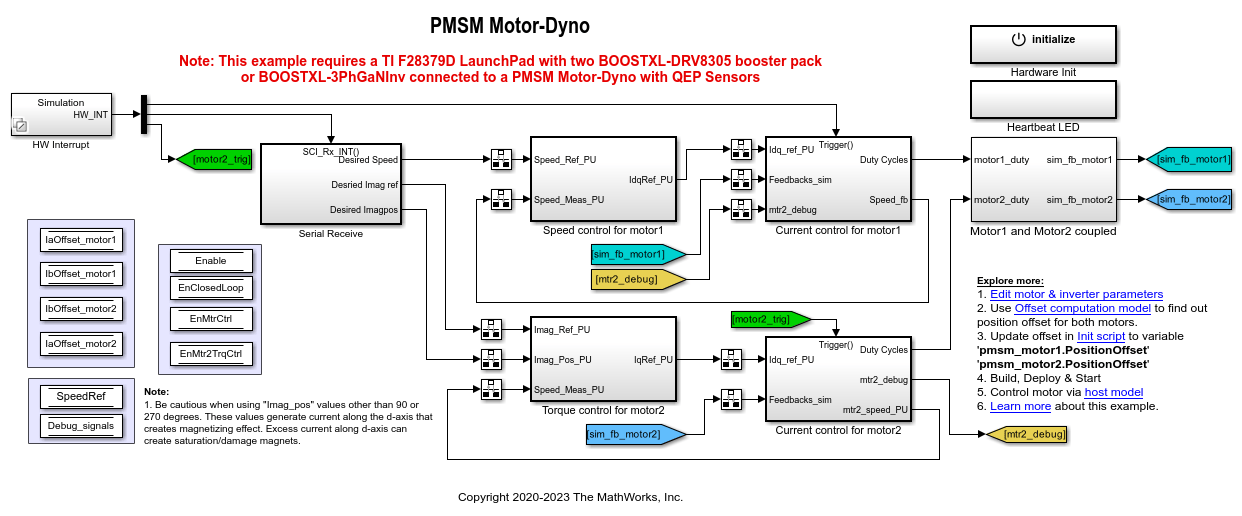
控制载有双电机(测功机)的 PMSM
此示例使用磁场定向控制 (FOC) 来控制测功机设置中耦合的两个三相永磁同步电机 (PMSM)。电机 1 在闭环转速控制模式下运行。电机 2 在转矩控制模式下运行,并且由于它们机械耦合,因此为电机 1 施加负载。您可以使用此示例在不同负载工况下测试电机。
使用 Simscape Electrical 对逆变器中的开关动态特性进行建模
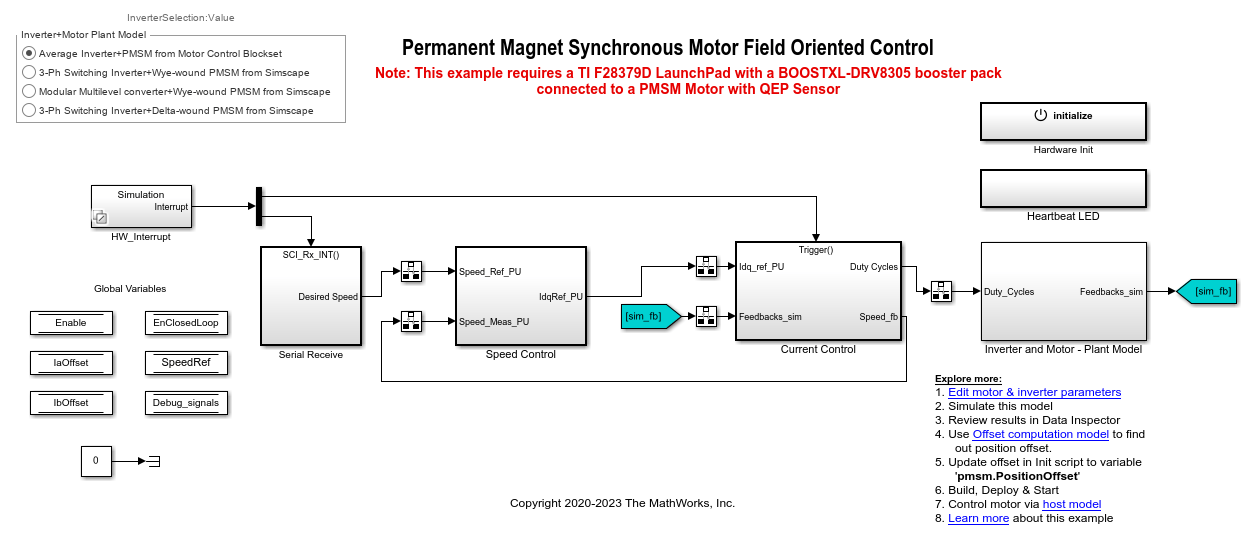
此示例使用磁场定向控制 (FOC) 来控制三相永磁同步电机 (PMSM) 的转速。它为您提供使用以下 Simscape™ Electrical™ 模块来代替 Motor Control Blockset™ 中 Average Value Inverter 模块的选项:
使用转速传感器实现感应电机的磁场定向控制
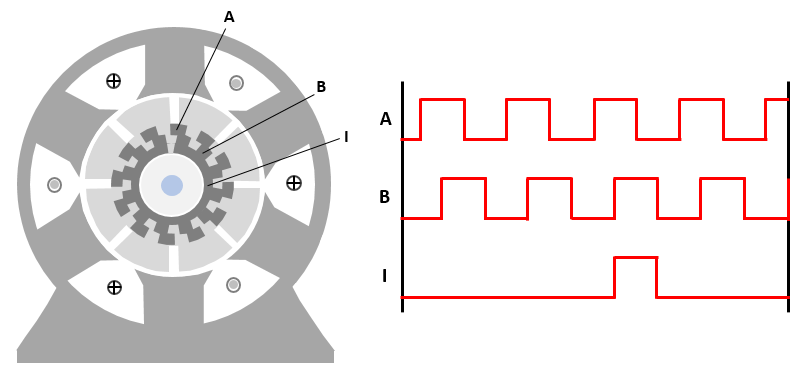
此示例采用磁场定向控制 (FOC) 方法来控制三相 AC 感应电机 (ACIM) 的转速。FOC 算法需要转子转速反馈,在此示例中通过使用正交编码器获得此反馈。有关 FOC 的详细信息,请参阅磁场定向控制。
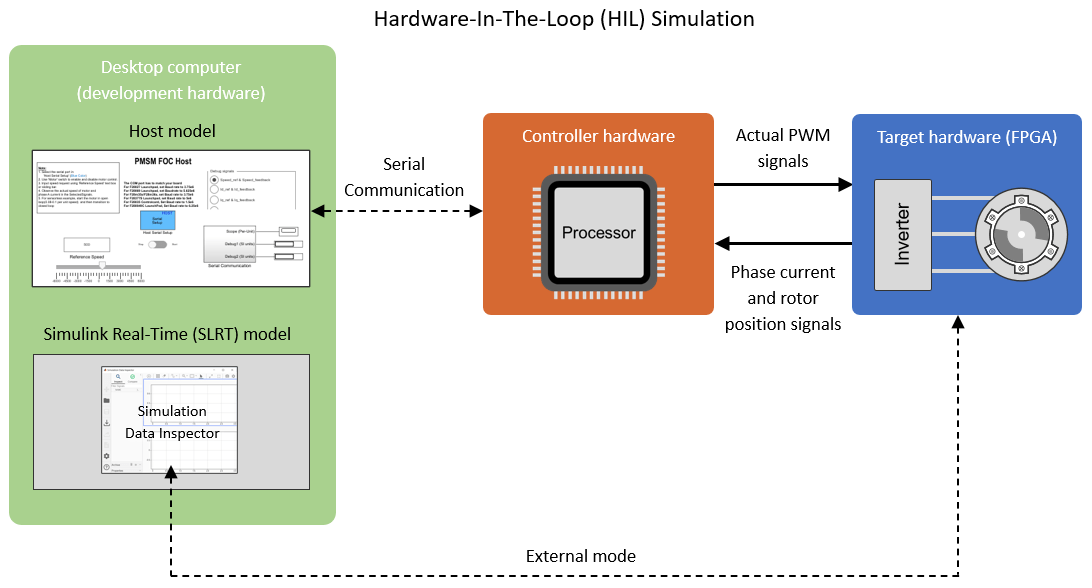
Field-Oriented Control (FOC) of PMSM Using Hardware-in-the-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the field-oriented control (FOC) algorithm to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For more information on FOC, see 磁场定向控制.
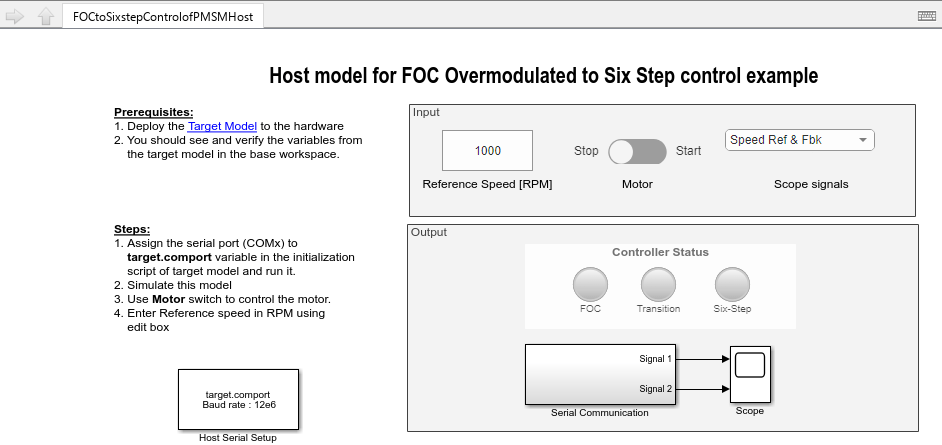
Field-oriented Control of PMSM with Six-Step Transition
Implement dynamic overmodulation to control a surface-mount permanent magnet synchronous motor (SPMSM) using field-oriented control (FOC). When the motor needs to reach higher speeds or produce more torque, the control method seamlessly transitions to six-step control. This allows the motor application to achieve better range without increasing the DC bus voltage of the inverter.

六相 PMSM 的磁场定向控制
此示例说明如何使用磁场定向控制 (FOC) 来控制非对称六相永磁同步电机 (PMSM) 的转矩。
控制载有双电机(测功机)的 PMSM
此示例使用磁场定向控制 (FOC) 来控制测功机设置中耦合的两个三相永磁同步电机 (PMSM)。电机 1 在闭环转速控制模式下运行。电机 2 在转矩控制模式下运行,并且由于它们机械耦合,因此为电机 1 施加负载。您可以使用此示例在不同负载工况下测试电机。
FOC of PMSM Using FPGA-Based Motor Control Development Kit
Use a Field-Oriented Control (FOC) algorithm for a Permanent Magnet Synchronous Motor (PMSM) by using blocks from the Motor Control Blockset™ on an FPGA device (Trenz Electronic™ Motor Control Development Kit TE0820).

PMSM 的弱磁控制(使用 MTPA)
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转矩和转速。FOC 算法需要转子位置反馈,该反馈通过正交编码器获得。有关 FOC 的详细信息,请参阅磁场定向控制。
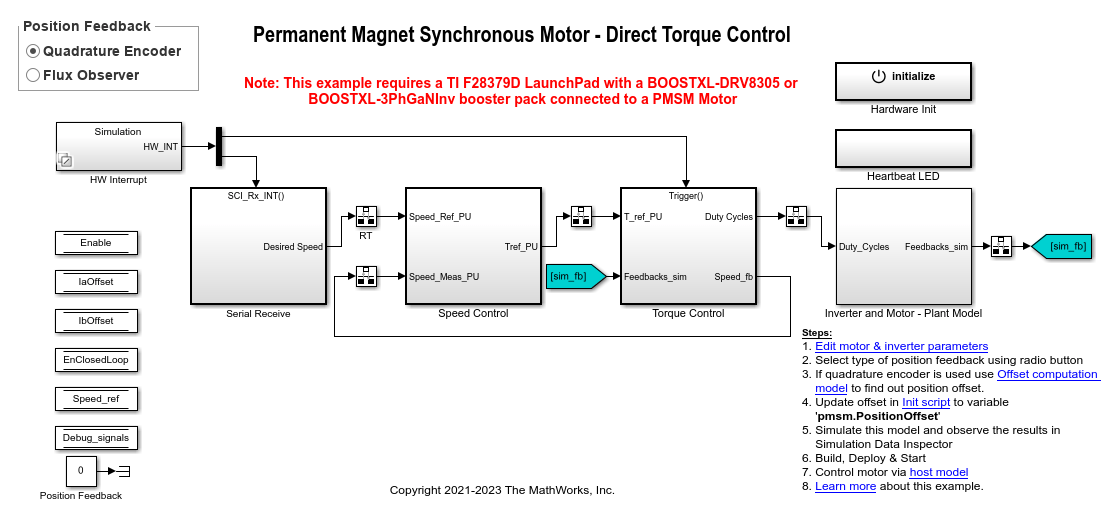
使用正交编码器或无传感器磁通观测器的 PMSM 直接转矩控制
此示例采用直接转矩控制 (DTC) 方法来控制三相永磁同步电机 (PMSM) 的转速。直接转矩控制 (DTC) 是一种矢量电机控制方法,它通过直接控制电机的磁通和转矩来实现电机转速控制。该示例算法需要从 PMSM 获取电机电流和位置反馈。它使用 DTC 的空间矢量脉冲宽度调制 (DTC-SVPWM) 变体,该变体使用空间矢量调制 (SVM) 来产生逆变器使用的脉冲宽度调制 (PWM) 占空比。有关此示例中使用的 DTC-SVPWM 算法的更多详细信息,请参阅直接转矩控制 (DTC)。